Convolutional (CNN) and Recurrent (RNN) Neural Networks
Dec 18, 2023
December 13 and 18
- Convolutional Neural Networks
- Readings and Videos:
- These lecture notes
- For a more in depth discussion on neural networks we recommend Goodfellow et al chapter 9. See also chapter 11 and 12 on practicalities and applications
- Reading suggestions for implementation of CNNs: Aurelien Geron's chapter 13.
- Video on Deep Learning
- Video on Convolutional Neural Networks from MIT
- Video on CNNs from Stanford
- See Michael Nielsen's Lectures
- "See Raschka, Liu and Mirjalili chapter 14":https://sebastianraschka.com/blog/2022/ml-pytorch-book.html"
Convolutional Neural Networks (recognizing images)
Convolutional neural networks (CNNs) were developed during the last decade of the previous century, with a focus on character recognition tasks. Nowadays, CNNs are a central element in the spectacular success of deep learning methods. The success in for example image classifications have made them a central tool for most machine learning practitioners.
CNNs are very similar to ordinary Neural Networks. They are made up of neurons that have learnable weights and biases. Each neuron receives some inputs, performs a dot product and optionally follows it with a non-linearity. The whole network still expresses a single differentiable score function: from the raw image pixels on one end to class scores at the other. And they still have a loss function (for example Softmax) on the last (fully-connected) layer and all the tips/tricks we developed for learning regular Neural Networks still apply (back propagation, gradient descent etc etc).
What is the Difference
CNN architectures make the explicit assumption that the inputs are images, which allows us to encode certain properties into the architecture. These then make the forward function more efficient to implement and vastly reduce the amount of parameters in the network.
Neural Networks vs CNNs
Neural networks are defined as affine transformations, that is a vector is received as input and is multiplied with a matrix of so-called weights (our unknown paramters) to produce an output (to which a bias vector is usually added before passing the result through a nonlinear activation function). This is applicable to any type of input, be it an image, a sound clip or an unordered collection of features: whatever their dimensionality, their representation can always be flattened into a vector before the transformation.
Why CNNS for images, sound files, medical images from CT scans etc?
However, when we consider images, sound clips and many other similar kinds of data, these data have an intrinsic structure. More formally, they share these important properties:
- They are stored as multi-dimensional arrays (think of the pixels of a figure) .
- They feature one or more axes for which ordering matters (e.g., width and height axes for an image, time axis for a sound clip).
- One axis, called the channel axis, is used to access different views of the data (e.g., the red, green and blue channels of a color image, or the left and right channels of a stereo audio track).
These properties are not exploited when an affine transformation is applied; in fact, all the axes are treated in the same way and the topological information is not taken into account. Still, taking advantage of the implicit structure of the data may prove very handy in solving some tasks, like computer vision and speech recognition, and in these cases it would be best to preserve it. This is where discrete convolutions come into play.
A discrete convolution is a linear transformation that preserves this notion of ordering. It is sparse (only a few input units contribute to a given output unit) and reuses parameters (the same weights are applied to multiple locations in the input).
Regular NNs don’t scale well to full images
As an example, consider an image of size \( 32\times 32\times 3 \) (32 wide, 32 high, 3 color channels), so a single fully-connected neuron in a first hidden layer of a regular Neural Network would have \( 32\times 32\times 3 = 3072 \) weights. This amount still seems manageable, but clearly this fully-connected structure does not scale to larger images. For example, an image of more respectable size, say \( 200\times 200\times 3 \), would lead to neurons that have \( 200\times 200\times 3 = 120,000 \) weights.
We could have several such neurons, and the parameters would add up quickly! Clearly, this full connectivity is wasteful and the huge number of parameters would quickly lead to possible overfitting.
Figure 1: A regular 3-layer Neural Network.
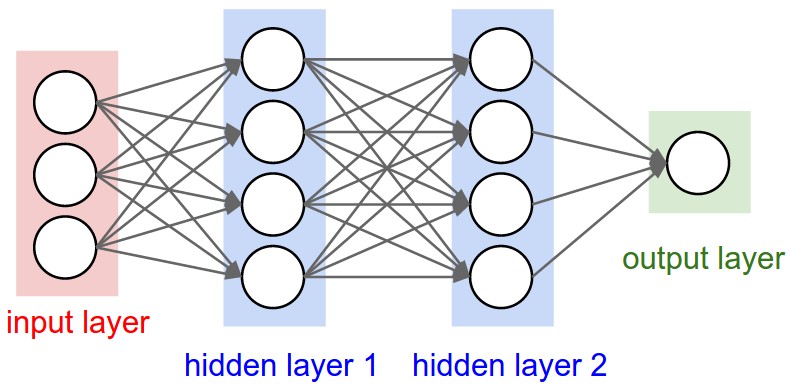
3D volumes of neurons
Convolutional Neural Networks take advantage of the fact that the input consists of images and they constrain the architecture in a more sensible way.
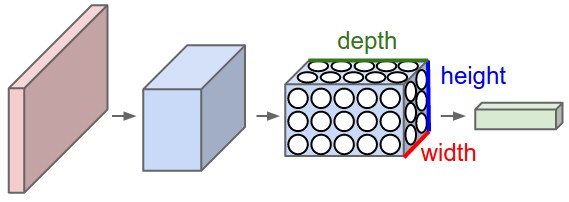
In particular, unlike a regular Neural Network, the layers of a CNN have neurons arranged in 3 dimensions: width, height, depth. (Note that the word depth here refers to the third dimension of an activation volume, not to the depth of a full Neural Network, which can refer to the total number of layers in a network.)
To understand it better, the above example of an image with an input volume of activations has dimensions \( 32\times 32\times 3 \) (width, height, depth respectively).
The neurons in a layer will only be connected to a small region of the layer before it, instead of all of the neurons in a fully-connected manner. Moreover, the final output layer could for this specific image have dimensions \( 1\times 1 \times 10 \), because by the end of the CNN architecture we will reduce the full image into a single vector of class scores, arranged along the depth dimension.
Figure 2: A CNN arranges its neurons in three dimensions (width, height, depth), as visualized in one of the layers. Every layer of a CNN transforms the 3D input volume to a 3D output volume of neuron activations. In this example, the red input layer holds the image, so its width and height would be the dimensions of the image, and the depth would be 3 (Red, Green, Blue channels).
Layers used to build CNNs
A simple CNN is a sequence of layers, and every layer of a CNN transforms one volume of activations to another through a differentiable function. We use three main types of layers to build CNN architectures: Convolutional Layer, Pooling Layer, and Fully-Connected Layer (exactly as seen in regular Neural Networks). We will stack these layers to form a full CNN architecture.
A simple CNN for image classification could have the architecture:
- INPUT (\( 32\times 32 \times 3 \)) will hold the raw pixel values of the image, in this case an image of width 32, height 32, and with three color channels R,G,B.
- CONV (convolutional )layer will compute the output of neurons that are connected to local regions in the input, each computing a dot product between their weights and a small region they are connected to in the input volume. This may result in volume such as \( [32\times 32\times 12] \) if we decided to use 12 filters.
- RELU layer will apply an elementwise activation function, such as the \( max(0,x) \) thresholding at zero. This leaves the size of the volume unchanged (\( [32\times 32\times 12] \)).
- POOL (pooling) layer will perform a downsampling operation along the spatial dimensions (width, height), resulting in volume such as \( [16\times 16\times 12] \).
- FC (i.e. fully-connected) layer will compute the class scores, resulting in volume of size \( [1\times 1\times 10] \), where each of the 10 numbers correspond to a class score, such as among the 10 categories of the MNIST images we considered above . As with ordinary Neural Networks and as the name implies, each neuron in this layer will be connected to all the numbers in the previous volume.
Transforming images
CNNs transform the original image layer by layer from the original pixel values to the final class scores.
Observe that some layers contain parameters and other don’t. In particular, the CNN layers perform transformations that are a function of not only the activations in the input volume, but also of the parameters (the weights and biases of the neurons). On the other hand, the RELU/POOL layers will implement a fixed function. The parameters in the CONV/FC layers will be trained with gradient descent so that the class scores that the CNN computes are consistent with the labels in the training set for each image.
CNNs in brief
In summary:
- A CNN architecture is in the simplest case a list of Layers that transform the image volume into an output volume (e.g. holding the class scores)
- There are a few distinct types of Layers (e.g. CONV/FC/RELU/POOL are by far the most popular)
- Each Layer accepts an input 3D volume and transforms it to an output 3D volume through a differentiable function
- Each Layer may or may not have parameters (e.g. CONV/FC do, RELU/POOL don’t)
- Each Layer may or may not have additional hyperparameters (e.g. CONV/FC/POOL do, RELU doesn’t)
For more material on convolutional networks, we strongly recommend the course CS231 which is taught at Stanford University (consistently ranked as one of the top computer science programs in the world). Michael Nielsen's book is a must read, in particular chapter 6 which deals with CNNs.
The textbook by Goodfellow et al, see chapter 9 contains an in depth discussion as well.
Key Idea
A dense neural network is representd by an affine operation (like matrix-matrix multiplication) where all parameters are included.
The key idea in CNNs for say imaging is that in images neighbor pixels tend to be related! So we connect only neighboring neurons in the input instead of connecting all with the first hidden layer.
We say we perform a filtering (convolution is the mathematical operation).
Mathematics of CNNs
The mathematics of CNNs is based on the mathematical operation of convolution. In mathematics (in particular in functional analysis), convolution is represented by mathematical operation (integration, summation etc) on two function in order to produce a third function that expresses how the shape of one gets modified by the other. Convolution has a plethora of applications in a variety of disciplines, spanning from statistics to signal processing, computer vision, solutions of differential equations,linear algebra, engineering, and yes, machine learning.
Mathematically, convolution is defined as follows (one-dimensional example): Let us define a continuous function \( y(t) \) given by
$$
y(t) = \int x(a) w(t-a) da,
$$
where \( x(a) \) represents a so-called input and \( w(t-a) \) is normally called the weight function or kernel.
The above integral is written in a more compact form as
$$
y(t) = \left(x * w\right)(t).
$$
The discretized version reads
$$
y(t) = \sum_{a=-\infty}^{a=\infty}x(a)w(t-a).
$$
Computing the inverse of the above convolution operations is known as deconvolution.
How can we use this? And what does it mean? Let us study some familiar examples first.
Convolution Examples: Polynomial multiplication
We have already met such an example in project 1 when we tried to set up the design matrix for a two-dimensional function. This was an example of polynomial multiplication. Let us recast such a problem in terms of the convolution operation. Let us look a the following polynomials to second and third order, respectively:
$$
p(t) = \alpha_0+\alpha_1 t+\alpha_2 t^2,
$$
and
$$
s(t) = \beta_0+\beta_1 t+\beta_2 t^2+\beta_3 t^3.
$$
The polynomial multiplication gives us a new polynomial of degree \( 5 \)
$$
z(t) = \delta_0+\delta_1 t+\delta_2 t^2+\delta_3 t^3+\delta_4 t^4+\delta_5 t^5.
$$
Efficient Polynomial Multiplication
Computing polynomial products can be implemented efficiently if we rewrite the more brute force multiplications using convolution. We note first that the new coefficients are given as
$$
\begin{split}
\delta_0=&\alpha_0\beta_0\\
\delta_1=&\alpha_1\beta_0+\alpha_1\beta_0\\
\delta_2=&\alpha_0\beta_2+\alpha_1\beta_1+\alpha_2\beta_0\\
\delta_3=&\alpha_1\beta_2+\alpha_2\beta_1+\alpha_0\beta_3\\
\delta_4=&\alpha_2\beta_2+\alpha_1\beta_3\\
\delta_5=&\alpha_2\beta_3.\\
\end{split}
$$
We note that \( \alpha_i=0 \) except for \( i\in \left\{0,1,2\right\} \) and \( \beta_i=0 \) except for \( i\in\left\{0,1,2,3\right\} \).
We can then rewrite the coefficients \( \delta_j \) using a discrete convolution as
$$
\delta_j = \sum_{i=-\infty}^{i=\infty}\alpha_i\beta_{j-i}=(\alpha * \beta)_j,
$$
or as a double sum with restriction \( l=i+j \)
$$
\delta_l = \sum_{ij}\alpha_i\beta_{j}.
$$
Do you see a potential drawback with these equations?
A more efficient way of coding the above Convolution
Since we only have a finite number of \( \alpha \) and \( \beta \) values which are non-zero, we can rewrite the above convolution expressions as a matrix-vector multiplication
$$
\boldsymbol{\delta}=\begin{bmatrix}\alpha_0 & 0 & 0 & 0 \\
\alpha_1 & \alpha_0 & 0 & 0 \\
\alpha_2 & \alpha_1 & \alpha_0 & 0 \\
0 & \alpha_2 & \alpha_1 & \alpha_0 \\
0 & 0 & \alpha_2 & \alpha_1 \\
0 & 0 & 0 & \alpha_2
\end{bmatrix}\begin{bmatrix} \beta_0 \\ \beta_1 \\ \beta_2 \\ \beta_3\end{bmatrix}.
$$
The process is commutative and we can easily see that we can rewrite the multiplication in terms of a matrix holding \( \beta \) and a vector holding \( \alpha \). In this case we have
$$
\boldsymbol{\delta}=\begin{bmatrix}\beta_0 & 0 & 0 \\
\beta_1 & \beta_0 & 0 \\
\beta_2 & \beta_1 & \beta_0 \\
\beta_3 & \beta_2 & \beta_1 \\
0 & \beta_3 & \beta_2 \\
0 & 0 & \beta_3
\end{bmatrix}\begin{bmatrix} \alpha_0 \\ \alpha_1 \\ \alpha_2\end{bmatrix}.
$$
Note that the use of these matrices is for mathematical purposes only and not implementation purposes. When implementing the above equation we do not encode (and allocate memory) the matrices explicitely. We rather code the convolutions in the minimal memory footprint that they require.
Does the number of floating point operations change here when we use the commutative property?
The above matrices are examples of so-called Toeplitz matrices. A Toeplitz matrix is a matrix in which each descending diagonal from left to right is constant. For instance the last matrix, which we rewrite as
$$
\boldsymbol{A}=\begin{bmatrix}a_0 & 0 & 0 \\
a_1 & a_0 & 0 \\
a_2 & a_1 & a_0 \\
a_3 & a_2 & a_1 \\
0 & a_3 & a_2 \\
0 & 0 & a_3
\end{bmatrix},
$$
with elements \( a_{ii}=a_{i+1,j+1}=a_{i-j} \) is an example of a Toeplitz matrix. Such a matrix does not need to be a square matrix. Toeplitz matrices are also closely connected with Fourier series discussed below, because the multiplication operator by a trigonometric polynomial, compressed to a finite-dimensional space, can be represented by such a matrix. The example above shows that we can represent linear convolution as multiplication of a Toeplitz matrix by a vector.
Convolution Examples: Principle of Superposition and Periodic Forces (Fourier Transforms)
For problems with so-called harmonic oscillations, given by for example the following differential equation
$$
m\frac{d^2x}{dt^2}+\eta\frac{dx}{dt}+x(t)=F(t),
$$
where \( F(t) \) is an applied external force acting on the system (often called a driving force), one can use the theory of Fourier transformations to find the solutions of this type of equations.
If one has several driving forces, \( F(t)=\sum_n F_n(t) \), one can find the particular solution \( x_{pn}(t) \) to the above differential equation for each \( F_n \). The particular solution for the entire driving force is then given by a series like
$$
\begin{equation}
x_p(t)=\sum_nx_{pn}(t).
\tag{1}
\end{equation}
$$
This is known as the principle of superposition. It only applies when the homogenous equation is linear. Superposition is especially useful when \( F(t) \) can be written as a sum of sinusoidal terms, because the solutions for each sinusoidal (sine or cosine) term is analytic.
Driving forces are often periodic, even when they are not sinusoidal. Periodicity implies that for some time \( t \) our function repeats itself periodically after a period \( \tau \), that is
$$
\begin{eqnarray}
F(t+\tau)=F(t).
\end{eqnarray}
$$
One example of a non-sinusoidal periodic force is a square wave. Many components in electric circuits are non-linear, for example diodes. This makes many wave forms non-sinusoidal even when the circuits are being driven by purely sinusoidal sources.
Simple Code Example
The code here shows a typical example of such a square wave generated using the functionality included in the scipy Python package. We have used a period of \( \tau=0.2 \).
import numpy as np
import math
from scipy import signal
import matplotlib.pyplot as plt
# number of points
n = 500
# start and final times
t0 = 0.0
tn = 1.0
# Period
t = np.linspace(t0, tn, n, endpoint=False)
SqrSignal = np.zeros(n)
SqrSignal = 1.0+signal.square(2*np.pi*5*t)
plt.plot(t, SqrSignal)
plt.ylim(-0.5, 2.5)
plt.show()
For the sinusoidal example the period is \( \tau=2\pi/\omega \). However, higher harmonics can also satisfy the periodicity requirement. In general, any force that satisfies the periodicity requirement can be expressed as a sum over harmonics,
$$
\begin{equation}
F(t)=\frac{f_0}{2}+\sum_{n>0} f_n\cos(2n\pi t/\tau)+g_n\sin(2n\pi t/\tau).
\tag{2}
\end{equation}
$$
Wrapping up Fourier transforms
We can write down the answer for \( x_{pn}(t) \), by substituting \( f_n/m \) or \( g_n/m \) for \( F_0/m \). By writing each factor \( 2n\pi t/\tau \) as \( n\omega t \), with \( \omega\equiv 2\pi/\tau \),
$$
\begin{equation}
\tag{3}
F(t)=\frac{f_0}{2}+\sum_{n>0}f_n\cos(n\omega t)+g_n\sin(n\omega t).
\end{equation}
$$
The solutions for \( x(t) \) then come from replacing \( \omega \) with \( n\omega \) for each term in the particular solution,
$$
\begin{eqnarray}
x_p(t)&=&\frac{f_0}{2k}+\sum_{n>0} \alpha_n\cos(n\omega t-\delta_n)+\beta_n\sin(n\omega t-\delta_n),\\
\nonumber
\alpha_n&=&\frac{f_n/m}{\sqrt{((n\omega)^2-\omega_0^2)+4\beta^2n^2\omega^2}},\\
\nonumber
\beta_n&=&\frac{g_n/m}{\sqrt{((n\omega)^2-\omega_0^2)+4\beta^2n^2\omega^2}},\\
\nonumber
\delta_n&=&\tan^{-1}\left(\frac{2\beta n\omega}{\omega_0^2-n^2\omega^2}\right).
\end{eqnarray}
$$
Finding the Coefficients
Because the forces have been applied for a long time, any non-zero damping eliminates the homogenous parts of the solution. We need then only consider the particular solution for each \( n \).
The problem is considered solved if one can find expressions for the coefficients \( f_n \) and \( g_n \), even though the solutions are expressed as an infinite sum. The coefficients can be extracted from the function \( F(t) \) by
$$
\begin{eqnarray}
\tag{4}
f_n&=&\frac{2}{\tau}\int_{-\tau/2}^{\tau/2} dt~F(t)\cos(2n\pi t/\tau),\\
\nonumber
g_n&=&\frac{2}{\tau}\int_{-\tau/2}^{\tau/2} dt~F(t)\sin(2n\pi t/\tau).
\end{eqnarray}
$$
To check the consistency of these expressions and to verify Eq. (4), one can insert the expansion of \( F(t) \) in Eq. (3) into the expression for the coefficients in Eq. (4) and see whether
$$
f_n=\frac{2}{\tau}\int_{-\tau/2}^{\tau/2} dt~\left\{\frac{f_0}{2}+\sum_{m>0}f_m\cos(m\omega t)+g_m\sin(m\omega t)\right\}\cos(n\omega t).
$$
Immediately, one can throw away all the terms with \( g_m \) because they convolute an even and an odd function. The term with \( f_0/2 \) disappears because \( \cos(n\omega t) \) is equally positive and negative over the interval and will integrate to zero. For all the terms \( f_m\cos(m\omega t) \) appearing in the sum, one can use angle addition formulas to see that \( \cos(m\omega t)\cos(n\omega t)=(1/2)(\cos[(m+n)\omega t]+\cos[(m-n)\omega t] \). This will integrate to zero unless \( m=n \). In that case the \( m=n \) term gives
$$
\begin{equation}
\int_{-\tau/2}^{\tau/2}dt~\cos^2(m\omega t)=\frac{\tau}{2},
\tag{5}
\end{equation}
$$
and
$$
f_n=\frac{2}{\tau}\int_{-\tau/2}^{\tau/2} dt~f_n/2=f_n.
$$
The same method can be used to check for the consistency of \( g_n \).
Final words on Fourier Transforms
The code here uses the Fourier series applied to a square wave signal. The code here visualizes the various approximations given by Fourier series compared with a square wave with period \( T=0.2 \) (dimensionless time), width \( 0.1 \) and max value of the force \( F=2 \). We see that when we increase the number of components in the Fourier series, the Fourier series approximation gets closer and closer to the square wave signal.
import numpy as np
import math
from scipy import signal
import matplotlib.pyplot as plt
# number of points
n = 500
# start and final times
t0 = 0.0
tn = 1.0
# Period
T =0.2
# Max value of square signal
Fmax= 2.0
# Width of signal
Width = 0.1
t = np.linspace(t0, tn, n, endpoint=False)
SqrSignal = np.zeros(n)
FourierSeriesSignal = np.zeros(n)
SqrSignal = 1.0+signal.square(2*np.pi*5*t+np.pi*Width/T)
a0 = Fmax*Width/T
FourierSeriesSignal = a0
Factor = 2.0*Fmax/np.pi
for i in range(1,500):
FourierSeriesSignal += Factor/(i)*np.sin(np.pi*i*Width/T)*np.cos(i*t*2*np.pi/T)
plt.plot(t, SqrSignal)
plt.plot(t, FourierSeriesSignal)
plt.ylim(-0.5, 2.5)
plt.show()
Fourier transforms and convolution
We can use Fourier transforms in our studies of convolution as well. To see this, assume we have two functions \( f \) and \( g \) and their corresponding Fourier transforms \( \hat{f} \) and \( \hat{g} \). We remind the reader that the Fourier transform reads (say for the function \( f \))
$$
\hat{f}(y)=\boldsymbol{F}[f(y)]=\frac{1}{2\pi}\int_{-\infty}^{\infty} d\omega \exp{-i\omega y} f(\omega),
$$
and similarly we have
$$
\hat{g}(y)=\boldsymbol{F}[g(y)]=\frac{1}{2\pi}\int_{-\infty}^{\infty} d\omega \exp{-i\omega y} g(\omega).
$$
The inverse Fourier transform is given by
$$
\boldsymbol{F}^{-1}[g(y)]=\frac{1}{2\pi}\int_{-\infty}^{\infty} d\omega \exp{i\omega y} g(\omega).
$$
The inverse Fourier transform of the product of the two functions \( \hat{f}\hat{g} \) can be written as
$$
\boldsymbol{F}^{-1}[(\hat{f}\hat{g})(x)]=\frac{1}{2\pi}\int_{-\infty}^{\infty} d\omega \exp{i\omega x} \hat{f}(\omega)\hat{g}(\omega).
$$
We can rewrite the latter as
$$
\boldsymbol{F}^{-1}[(\hat{f}\hat{g})(x)]=\int_{-\infty}^{\infty} d\omega \exp{i\omega x} \hat{f}(\omega)\left[\frac{1}{2\pi}\int_{-\infty}^{\infty}g(y)dy \exp{-i\omega y}\right]=\frac{1}{2\pi}\int_{-\infty}^{\infty}dy g(y)\int_{-\infty}^{\infty} d\omega \hat{f}(\omega) \exp{i\omega(x- y)},
$$
which is simply
$$
\boldsymbol{F}^{-1}[(\hat{f}\hat{g})(x)]=\int_{-\infty}^{\infty}dy g(y)f(x-y)=(f*g)(x),
$$
the convolution of the functions \( f \) and \( g \).
Two-dimensional Objects
We are now ready to start studying the discrete convolutions relevant for convolutional neural networks. We often use convolutions over more than one dimension at a time. If we have a two-dimensional image \( I \) as input, we can have a filter defined by a two-dimensional kernel \( K \). This leads to an output \( S \)
$$
S_(i,j)=(I * K)(i,j) = \sum_m\sum_n I(m,n)K(i-m,j-n).
$$
Convolution is a commutatitave process, which means we can rewrite this equation as
$$
S_(i,j)=(I * K)(i,j) = \sum_m\sum_n I(i-m,j-n)K(m,n).
$$
Normally the latter is more straightforward to implement in a machine larning library since there is less variation in the range of values of \( m \) and \( n \).
Many deep learning libraries implement cross-correlation instead of convolution (although it is referred to s convolution)
$$
S_(i,j)=(I * K)(i,j) = \sum_m\sum_n I(i+m,j+n)K(m,n).
$$
More on Dimensionalities
In fields like signal processing (and imaging as well), one designs so-called filters. These filters are defined by the convolutions and are often hand-crafted. One may specify filters for smoothing, edge detection, frequency reshaping, and similar operations. However with neural networks the idea is to automatically learn the filters and use many of them in conjunction with non-linear operations (activation functions).
As an example consider a neural network operating on sound sequence data. Assume that we an input vector \( \boldsymbol{x} \) of length \( d=10^6 \). We construct then a neural network with onle hidden layer only with \( 10^4 \) nodes. This means that we will have a weight matrix with \( 10^4\times 10^6=10^{10} \) weights to be determined, together with \( 10^4 \) biases.
Assume furthermore that we have an output layer which is meant to train whether the sound sequence represents a human voice (true) or something else (false). It means that we have only one output node. But since this output node connects to \( 10^4 \) nodes in the hidden layer, there are in total \( 10^4 \) weights to be determined for the output layer, plus one bias. In total we have
$$
\mathrm{NumberParameters}=10^{10}+10^4+10^4+1 \approx 10^{10},
$$
that is ten billion parameters to determine.
Further Dimensionality Remarks
In today’s architecture one can train such neural networks, however this is a huge number of parameters for the task at hand. In general, it is a very wasteful and inefficient use of dense matrices as parameters. Just as importantly, such trained network parameters are very specific for the type of input data on which they were trained and the network is not likely to generalize easily to variations in the input.
The main principles that justify convolutions is locality of information and repetion of patterns within the signal. Sound samples of the input in adjacent spots are much more likely to affect each other than those that are very far away. Similarly, sounds are repeated in multiple times in the signal. While slightly simplistic, reasoning about such a sound example demonstrates this. The same principles then apply to images and other similar data.
CNNs in more detail
Let assume we have an input matrix \( I \) of dimensionality \( 3\times 3 \) and a \( 2\times 2 \) filter \( W \) given by the following matrices
$$
\boldsymbol{I}=\begin{bmatrix}i_{00} & i_{01} & i_{02} \\
i_{10} & i_{11} & i_{12} \\
i_{20} & i_{21} & i_{22} \end{bmatrix},
$$
and
$$
\boldsymbol{W}=\begin{bmatrix}w_{00} & w_{01} \\
w_{10} & w_{11}\end{bmatrix}.
$$
We introduce now the hyperparameter \( S \) stride. Stride represents how the filter \( W \) moves the convolution process on the matrix \( I \). We strongly recommend the repository on Arithmetic of deep learning by Dumoulin and Visin
Here we set the stride equal to \( S=1 \), which means that, starting with the element \( i_{00} \), the filter will act on \( 2\times 2 \) submatrices each time, starting with the upper corner and moving according to the stride value column by column.
Here we perform the operation
$$
S_(i,j)=(I * W)(i,j) = \sum_m\sum_n I(i-m,j-n)W(m,n),
$$
and obtain
$$
\boldsymbol{S}=\begin{bmatrix}i_{00}w_{00}+i_{01}w_{01}+i_{10}w_{10}+i_{11}w_{11} & i_{01}w_{00}+i_{02}w_{01}+i_{11}w_{10}+i_{12}w_{11} \\
i_{10}w_{00}+i_{11}w_{01}+i_{20}w_{10}+i_{21}w_{11} & i_{11}w_{00}+i_{12}w_{01}+i_{21}w_{10}+i_{22}w_{11}\end{bmatrix}.
$$
We can rewrite this operation in terms of a matrix-vector multiplication by defining a new vector where we flatten out the inputs as a vector \( \boldsymbol{I}' \) of length \( 9 \) and a matrix \( \boldsymbol{W}' \) with dimension \( 4\times 9 \) as
$$
\boldsymbol{I}'=\begin{bmatrix}i_{00} \\ i_{01} \\ i_{02} \\ i_{10} \\ i_{11} \\ i_{12} \\ i_{20} \\ i_{21} \\ i_{22} \end{bmatrix},
$$
and the new matrix
$$
\boldsymbol{W}'=\begin{bmatrix} w_{00} & w_{01} & 0 & w_{10} & w_{11} & 0 & 0 & 0 & 0 \\
0 & w_{00} & w_{01} & 0 & w_{10} & w_{11} & 0 & 0 & 0 \\
0 & 0 & 0 & w_{00} & w_{01} & 0 & w_{10} & w_{11} & 0 \\
0 & 0 & 0 & 0 & w_{00} & w_{01} & 0 & w_{10} & w_{11}\end{bmatrix}.
$$
We see easily that performing the matrix-vector multiplication \( \boldsymbol{W}'\boldsymbol{I}' \) is the same as the above convolution with stride \( S=1 \), that is
$$
S=(\boldsymbol{W}*\boldsymbol{I}),
$$
is now given by \( \boldsymbol{W}'\boldsymbol{I}' \) which is a vector of length \( 4 \) instead of the originally resulting \( 2\times 2 \) output matrix.
The collection of kernels/filters \( W \) defining a discrete convolution has a shape corresponding to some permutation of \( (n, m, k_1, \ldots, k_N) \), where
$$ \begin{equation*} \begin{split} n &\equiv \text{number of output feature maps},\\ m &\equiv \text{number of input feature maps},\\ k_j &\equiv \text{kernel size along axis $j$}. \end{split} \end{equation*} $$The following properties affect the output size \( o_j \) of a convolutional layer along axis \( j \):
- \( i_j \): input size along axis \( j \),
- \( k_j \): kernel/filter size along axis \( j \),
- stride (distance between two consecutive positions of the kernel/filter) along axis \( j \),
- zero padding (number of zeros concatenated at the beginning and at the end of an axis) along axis \( j \).
For instance, the above examples shows a \( 2\times 2 \) kernel/filter \( \boldsymbol{W} \) applied to a \( 3 \times 3 \) input padded with a \( 0 \times 0 \) border of zeros using \( 1 \times 1 \) strides.
Note that strides constitute a form of subsampling. As an alternative to being interpreted as a measure of how much the kernel/filter is translated, strides can also be viewed as how much of the output is retained. For instance, moving the kernel by hops of two is equivalent to moving the kernel by hops of one but retaining only odd output elements.
Pooling
In addition to discrete convolutions themselves, pooling operations make up another important building block in CNNs. Pooling operations reduce the size of feature maps by using some function to summarize subregions, such as taking the average or the maximum value.
Pooling works by sliding a window across the input and feeding the content of the window to a pooling function. In some sense, pooling works very much like a discrete convolution, but replaces the linear combination described by the kernel with some other function. Pooling provides an example for average pooling, and does the same for max pooling.
The following properties affect the output size \( o_j \) of a pooling layer along axis \( j \):
- \( i_j \): input size along axis \( j \),
- \( k_j \): pooling window size along axis \( j \),
- \( s_j \): stride (distance between two consecutive positions of the pooling window) along axis \( j \).
The analysis of the relationship between convolutional layer properties is eased by the fact that they don't interact across axes, i.e., the choice of kernel size, stride and zero padding along axis \( j \) only affects the output size of axis \( j \). Because of that, we will focus on the following simplified setting:
- 2-D discrete convolutions (\( N = 2 \)),
- square inputs (\( i_1 = i_2 = i \)),
- square kernel size (\( k_1 = k_2 = k \)),
- same strides along both axes (\( s_1 = s_2 = s \)),
- same zero padding along both axes (\( p_1 = p_2 = p \)).
This facilitates the analysis and the visualization, but keep in mind that the results outlined here also generalize to the N-D and non-square cases.
No zero padding, unit strides
The simplest case to analyze is when the kernel just slides across every position of the input (i.e., \( s = 1 \) and \( p = 0 \)).
For any \( i \) and \( k \), and for \( s = 1 \) and \( p = 0 \),
$$
\begin{equation*}
o = (i - k) + 1.
\end{equation*}
$$
Zero padding, unit strides
To factor in zero padding (i.e., only restricting to \( s = 1 \)), let's consider its effect on the effective input size: padding with \( p \) zeros changes the effective input size from \( i \) to \( i + 2p \). In the general case, we can infer the following relationship
For any \( i \), \( k \) and \( p \), and for \( s = 1 \),
$$
\begin{equation*}
o = (i - k) + 2p + 1.
\end{equation*}
$$
Half (same) padding
Having the output size be the same as the input size (i.e., \( o = i \)) can be a desirable property:
For any \( i \) and for \( k \) odd (\( k = 2n + 1, \quad n \in \mathbb{N} \)), \( s = 1 \) and \( p = \lfloor k / 2 \rfloor = n \),
$$
\begin{equation*}
\begin{split}
o &= i + 2 \lfloor k / 2 \rfloor - (k - 1) \\
&= i + 2n - 2n \\
&= i.
\end{split}
\end{equation*}
$$
Full padding
While convolving a kernel generally decreases the output size with respect to the input size, sometimes the opposite is required. This can be achieved with proper zero padding:
For any \( i \) and \( k \), and for \( p = k - 1 \) and \( s = 1 \),
$$
\begin{equation*}
\begin{split}
o &= i + 2(k - 1) - (k - 1) \\
&= i + (k - 1).
\end{split}
\end{equation*}
$$
This is sometimes referred to as full padding, because in this setting every possible partial or complete superimposition of the kernel on the input feature map is taken into account.
Pooling arithmetic
In a neural network, pooling layers provide invariance to small translations of the input. The most common kind of pooling is max pooling, which consists in splitting the input in (usually non-overlapping) patches and outputting the maximum value of each patch. Other kinds of pooling exist, e.g., mean or average pooling, which all share the same idea of aggregating the input locally by applying a non-linearity to the content of some patches.
Since pooling does not involve zero padding, the relationship describing the general case is as follows:
For any \( i \), \( k \) and \( s \),
$$
\begin{equation*}
o = \left\lfloor \frac{i - k}{s} \right\rfloor + 1.
\end{equation*}
$$
CNNs in more detail, building convolutional neural networks in Tensorflow and Keras
As discussed above, CNNs are neural networks built from the assumption that the inputs to the network are 2D images. This is important because the number of features or pixels in images grows very fast with the image size, and an enormous number of weights and biases are needed in order to build an accurate network.
As before, we still have our input, a hidden layer and an output. What's novel about convolutional networks are the convolutional and pooling layers stacked in pairs between the input and the hidden layer. In addition, the data is no longer represented as a 2D feature matrix, instead each input is a number of 2D matrices, typically 1 for each color dimension (Red, Green, Blue).
Setting it up
It means that to represent the entire dataset of images, we require a 4D matrix or tensor. This tensor has the dimensions:
$$
(n_{inputs},\, n_{pixels, width},\, n_{pixels, height},\, depth) .
$$
The MNIST dataset again
The MNIST dataset consists of grayscale images with a pixel size of \( 28\times 28 \), meaning we require \( 28 \times 28 = 724 \) weights to each neuron in the first hidden layer.
If we were to analyze images of size \( 128\times 128 \) we would require \( 128 \times 128 = 16384 \) weights to each neuron. Even worse if we were dealing with color images, as most images are, we have an image matrix of size \( 128\times 128 \) for each color dimension (Red, Green, Blue), meaning 3 times the number of weights \( = 49152 \) are required for every single neuron in the first hidden layer.
Strong correlations
Images typically have strong local correlations, meaning that a small part of the image varies little from its neighboring regions. If for example we have an image of a blue car, we can roughly assume that a small blue part of the image is surrounded by other blue regions.
Therefore, instead of connecting every single pixel to a neuron in the first hidden layer, as we have previously done with deep neural networks, we can instead connect each neuron to a small part of the image (in all 3 RGB depth dimensions). The size of each small area is fixed, and known as a receptive.
Layers of a CNN
The layers of a convolutional neural network arrange neurons in 3D: width, height and depth. The input image is typically a square matrix of depth 3.
A convolution is performed on the image which outputs a 3D volume of neurons. The weights to the input are arranged in a number of 2D matrices, known as filters.
Each filter slides along the input image, taking the dot product between each small part of the image and the filter, in all depth dimensions. This is then passed through a non-linear function, typically the Rectified Linear (ReLu) function, which serves as the activation of the neurons in the first convolutional layer. This is further passed through a pooling layer, which reduces the size of the convolutional layer, e.g. by taking the maximum or average across some small regions, and this serves as input to the next convolutional layer.
Systematic reduction
By systematically reducing the size of the input volume, through convolution and pooling, the network should create representations of small parts of the input, and then from them assemble representations of larger areas. The final pooling layer is flattened to serve as input to a hidden layer, such that each neuron in the final pooling layer is connected to every single neuron in the hidden layer. This then serves as input to the output layer, e.g. a softmax output for classification.
Prerequisites: Collect and pre-process data
# import necessary packages
import numpy as np
import matplotlib.pyplot as plt
from sklearn import datasets
# ensure the same random numbers appear every time
np.random.seed(0)
# display images in notebook
%matplotlib inline
plt.rcParams['figure.figsize'] = (12,12)
# download MNIST dataset
digits = datasets.load_digits()
# define inputs and labels
inputs = digits.images
labels = digits.target
# RGB images have a depth of 3
# our images are grayscale so they should have a depth of 1
inputs = inputs[:,:,:,np.newaxis]
print("inputs = (n_inputs, pixel_width, pixel_height, depth) = " + str(inputs.shape))
print("labels = (n_inputs) = " + str(labels.shape))
# choose some random images to display
n_inputs = len(inputs)
indices = np.arange(n_inputs)
random_indices = np.random.choice(indices, size=5)
for i, image in enumerate(digits.images[random_indices]):
plt.subplot(1, 5, i+1)
plt.axis('off')
plt.imshow(image, cmap=plt.cm.gray_r, interpolation='nearest')
plt.title("Label: %d" % digits.target[random_indices[i]])
plt.show()
Importing Keras and Tensorflow
from tensorflow.keras import datasets, layers, models
from tensorflow.keras.layers import Input
from tensorflow.keras.models import Sequential #This allows appending layers to existing models
from tensorflow.keras.layers import Dense #This allows defining the characteristics of a particular layer
from tensorflow.keras import optimizers #This allows using whichever optimiser we want (sgd,adam,RMSprop)
from tensorflow.keras import regularizers #This allows using whichever regularizer we want (l1,l2,l1_l2)
from tensorflow.keras.utils import to_categorical #This allows using categorical cross entropy as the cost function
#from tensorflow.keras import Conv2D
#from tensorflow.keras import MaxPooling2D
#from tensorflow.keras import Flatten
from sklearn.model_selection import train_test_split
# representation of labels
labels = to_categorical(labels)
# split into train and test data
# one-liner from scikit-learn library
train_size = 0.8
test_size = 1 - train_size
X_train, X_test, Y_train, Y_test = train_test_split(inputs, labels, train_size=train_size,
test_size=test_size)
Running with Keras
def create_convolutional_neural_network_keras(input_shape, receptive_field,
n_filters, n_neurons_connected, n_categories,
eta, lmbd):
model = Sequential()
model.add(layers.Conv2D(n_filters, (receptive_field, receptive_field), input_shape=input_shape, padding='same',
activation='relu', kernel_regularizer=regularizers.l2(lmbd)))
model.add(layers.MaxPooling2D(pool_size=(2, 2)))
model.add(layers.Flatten())
model.add(layers.Dense(n_neurons_connected, activation='relu', kernel_regularizer=regularizers.l2(lmbd)))
model.add(layers.Dense(n_categories, activation='softmax', kernel_regularizer=regularizers.l2(lmbd)))
sgd = optimizers.SGD(lr=eta)
model.compile(loss='categorical_crossentropy', optimizer=sgd, metrics=['accuracy'])
return model
epochs = 100
batch_size = 100
input_shape = X_train.shape[1:4]
receptive_field = 3
n_filters = 10
n_neurons_connected = 50
n_categories = 10
eta_vals = np.logspace(-5, 1, 7)
lmbd_vals = np.logspace(-5, 1, 7)
Final part
CNN_keras = np.zeros((len(eta_vals), len(lmbd_vals)), dtype=object)
for i, eta in enumerate(eta_vals):
for j, lmbd in enumerate(lmbd_vals):
CNN = create_convolutional_neural_network_keras(input_shape, receptive_field,
n_filters, n_neurons_connected, n_categories,
eta, lmbd)
CNN.fit(X_train, Y_train, epochs=epochs, batch_size=batch_size, verbose=0)
scores = CNN.evaluate(X_test, Y_test)
CNN_keras[i][j] = CNN
print("Learning rate = ", eta)
print("Lambda = ", lmbd)
print("Test accuracy: %.3f" % scores[1])
print()
Final visualization
# visual representation of grid search
# uses seaborn heatmap, could probably do this in matplotlib
import seaborn as sns
sns.set()
train_accuracy = np.zeros((len(eta_vals), len(lmbd_vals)))
test_accuracy = np.zeros((len(eta_vals), len(lmbd_vals)))
for i in range(len(eta_vals)):
for j in range(len(lmbd_vals)):
CNN = CNN_keras[i][j]
train_accuracy[i][j] = CNN.evaluate(X_train, Y_train)[1]
test_accuracy[i][j] = CNN.evaluate(X_test, Y_test)[1]
fig, ax = plt.subplots(figsize = (10, 10))
sns.heatmap(train_accuracy, annot=True, ax=ax, cmap="viridis")
ax.set_title("Training Accuracy")
ax.set_ylabel("$\eta$")
ax.set_xlabel("$\lambda$")
plt.show()
fig, ax = plt.subplots(figsize = (10, 10))
sns.heatmap(test_accuracy, annot=True, ax=ax, cmap="viridis")
ax.set_title("Test Accuracy")
ax.set_ylabel("$\eta$")
ax.set_xlabel("$\lambda$")
plt.show()
The CIFAR01 data set
The CIFAR10 dataset contains 60,000 color images in 10 classes, with 6,000 images in each class. The dataset is divided into 50,000 training images and 10,000 testing images. The classes are mutually exclusive and there is no overlap between them.
import tensorflow as tf
from tensorflow.keras import datasets, layers, models
import matplotlib.pyplot as plt
# We import the data set
(train_images, train_labels), (test_images, test_labels) = datasets.cifar10.load_data()
# Normalize pixel values to be between 0 and 1 by dividing by 255.
train_images, test_images = train_images / 255.0, test_images / 255.0
Verifying the data set
To verify that the dataset looks correct, let's plot the first 25 images from the training set and display the class name below each image.
class_names = ['airplane', 'automobile', 'bird', 'cat', 'deer',
'dog', 'frog', 'horse', 'ship', 'truck']
plt.figure(figsize=(10,10))
for i in range(25):
plt.subplot(5,5,i+1)
plt.xticks([])
plt.yticks([])
plt.grid(False)
plt.imshow(train_images[i], cmap=plt.cm.binary)
# The CIFAR labels happen to be arrays,
# which is why you need the extra index
plt.xlabel(class_names[train_labels[i][0]])
plt.show()
Set up the model
The 6 lines of code below define the convolutional base using a common pattern: a stack of Conv2D and MaxPooling2D layers.
As input, a CNN takes tensors of shape (image_height, image_width, color_channels), ignoring the batch size. If you are new to these dimensions, color_channels refers to (R,G,B). In this example, you will configure our CNN to process inputs of shape (32, 32, 3), which is the format of CIFAR images. You can do this by passing the argument input_shape to our first layer.
model = models.Sequential()
model.add(layers.Conv2D(32, (3, 3), activation='relu', input_shape=(32, 32, 3)))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Conv2D(64, (3, 3), activation='relu'))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Conv2D(64, (3, 3), activation='relu'))
# Let's display the architecture of our model so far.
model.summary()
You can see that the output of every Conv2D and MaxPooling2D layer is a 3D tensor of shape (height, width, channels). The width and height dimensions tend to shrink as you go deeper in the network. The number of output channels for each Conv2D layer is controlled by the first argument (e.g., 32 or 64). Typically, as the width and height shrink, you can afford (computationally) to add more output channels in each Conv2D layer.
Add Dense layers on top
To complete our model, you will feed the last output tensor from the convolutional base (of shape (4, 4, 64)) into one or more Dense layers to perform classification. Dense layers take vectors as input (which are 1D), while the current output is a 3D tensor. First, you will flatten (or unroll) the 3D output to 1D, then add one or more Dense layers on top. CIFAR has 10 output classes, so you use a final Dense layer with 10 outputs and a softmax activation.
model.add(layers.Flatten())
model.add(layers.Dense(64, activation='relu'))
model.add(layers.Dense(10))
Here's the complete architecture of our model.
model.summary()
As you can see, our (4, 4, 64) outputs were flattened into vectors of shape (1024) before going through two Dense layers.
Compile and train the model
model.compile(optimizer='adam',
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True),
metrics=['accuracy'])
history = model.fit(train_images, train_labels, epochs=10,
validation_data=(test_images, test_labels))
Finally, evaluate the model
plt.plot(history.history['accuracy'], label='accuracy')
plt.plot(history.history['val_accuracy'], label = 'val_accuracy')
plt.xlabel('Epoch')
plt.ylabel('Accuracy')
plt.ylim([0.5, 1])
plt.legend(loc='lower right')
test_loss, test_acc = model.evaluate(test_images, test_labels, verbose=2)
print(test_acc)
Building our own CNN code
Here we present a flexible and readable python code for a CNN implemented with NumPy. We will present the code, showcase how to use the codebase and fit a CNN that yields a 99% accuracy on the 28x28 MNIST dataset within reasonable time.
The CNN is compatible with all schedulers, cost functions and activation functions discussed in constructing our neural network codes.
The CNN code consists of different types of Layer classes, including Convolution2DLayer, Pooling2DLayer, FlattenLayer, FullyConnectedLayer and OutputLayer, which can be added to the CNN object using the interface of the CNN class. This allows you to easily construct your own CNN, as well as allowing you to get used to an interface similar to that of TensorFlow which is used for real world applications.
Another important feature of this code is that it throws errors if unreasonable decisions are made (for example using a kernel that is larger than the image, not using a FlattenLayer, etc), and provides the user with an informative error message.
List of contents:
- Schedulers
- Activation Functions
- Cost Functions
- Convolution
- Layers
- CNN
- Some final remarks
Schedulers
The code below shows object oriented implementations of the Constant, Momentum, Adagrad, AdagradMomentum, RMS prop and Adam schedulers. All of the classes belong to the shared abstract Scheduler class, and share the update_change() and reset() methods allowing for any of the schedulers to be seamlessly used during the training stage, as will later be shown in the fit() method of the neural network. Update_change() only has one parameter, the gradient (\( \delta^{l}_{j}a^{l-1}_k \)), and returns the change which will be subtracted from the weights. The reset() function takes no parameters, and resets the desired variables. For Constant and Momentum, reset does nothing.
import autograd.numpy as np
class Scheduler:
"""
Abstract class for Schedulers
"""
def __init__(self, eta):
self.eta = eta
# should be overwritten
def update_change(self, gradient):
raise NotImplementedError
# overwritten if needed
def reset(self):
pass
class Constant(Scheduler):
def __init__(self, eta):
super().__init__(eta)
def update_change(self, gradient):
return self.eta * gradient
def reset(self):
pass
class Momentum(Scheduler):
def __init__(self, eta: float, momentum: float):
super().__init__(eta)
self.momentum = momentum
self.change = 0
def update_change(self, gradient):
self.change = self.momentum * self.change + self.eta * gradient
return self.change
def reset(self):
pass
class Adagrad(Scheduler):
def __init__(self, eta):
super().__init__(eta)
self.G_t = None
def update_change(self, gradient):
delta = 1e-8 # avoid division ny zero
if self.G_t is None:
self.G_t = np.zeros((gradient.shape[0], gradient.shape[0]))
self.G_t += gradient @ gradient.T
G_t_inverse = 1 / (
delta + np.sqrt(np.reshape(np.diagonal(self.G_t), (self.G_t.shape[0], 1)))
)
return self.eta * gradient * G_t_inverse
def reset(self):
self.G_t = None
class AdagradMomentum(Scheduler):
def __init__(self, eta, momentum):
super().__init__(eta)
self.G_t = None
self.momentum = momentum
self.change = 0
def update_change(self, gradient):
delta = 1e-8 # avoid division ny zero
if self.G_t is None:
self.G_t = np.zeros((gradient.shape[0], gradient.shape[0]))
self.G_t += gradient @ gradient.T
G_t_inverse = 1 / (
delta + np.sqrt(np.reshape(np.diagonal(self.G_t), (self.G_t.shape[0], 1)))
)
self.change = self.change * self.momentum + self.eta * gradient * G_t_inverse
return self.change
def reset(self):
self.G_t = None
class RMS_prop(Scheduler):
def __init__(self, eta, rho):
super().__init__(eta)
self.rho = rho
self.second = 0.0
def update_change(self, gradient):
delta = 1e-8 # avoid division ny zero
self.second = self.rho * self.second + (1 - self.rho) * gradient * gradient
return self.eta * gradient / (np.sqrt(self.second + delta))
def reset(self):
self.second = 0.0
class Adam(Scheduler):
def __init__(self, eta, rho, rho2):
super().__init__(eta)
self.rho = rho
self.rho2 = rho2
self.moment = 0
self.second = 0
self.n_epochs = 1
def update_change(self, gradient):
delta = 1e-8 # avoid division ny zero
self.moment = self.rho * self.moment + (1 - self.rho) * gradient
self.second = self.rho2 * self.second + (1 - self.rho2) * gradient * gradient
moment_corrected = self.moment / (1 - self.rho**self.n_epochs)
second_corrected = self.second / (1 - self.rho2**self.n_epochs)
return self.eta * moment_corrected / (np.sqrt(second_corrected + delta))
def reset(self):
self.n_epochs += 1
self.moment = 0
self.second = 0
Usage of schedulers
To initalize a scheduler, simply create the object and pass in the necessary parameters such as the learning rate and the momentum as shown below. As the Scheduler class is an abstract class it should not called directly, and will raise an error upon usage.
momentum_scheduler = Momentum(eta=1e-3, momentum=0.9)
adam_scheduler = Adam(eta=1e-3, rho=0.9, rho2=0.999)
Here is a small example for how a segment of code using schedulers could look. Switching out the schedulers is simple.
weights = np.ones((3,3))
print(f"Before scheduler:\n{weights=}")
epochs = 10
for e in range(epochs):
gradient = np.random.rand(3, 3)
change = adam_scheduler.update_change(gradient)
weights = weights - change
adam_scheduler.reset()
print(f"\nAfter scheduler:\n{weights=}")
Cost functions
In this section we will quickly look at cost functions that can be used when creating the neural network. Every cost function takes the target vector as its parameter, and returns a function valued only at X such that it may easily be differentiated.
def CostOLS(target):
"""
Return OLS function valued only at X, so
that it may be easily differentiated
"""
def func(X):
return (1.0 / target.shape[0]) * np.sum((target - X) ** 2)
return func
def CostLogReg(target):
"""
Return Logistic Regression cost function
valued only at X, so that it may be easily differentiated
"""
def func(X):
return -(1.0 / target.shape[0]) * np.sum(
(target * np.log(X + 10e-10)) + ((1 - target) * np.log(1 - X + 10e-10))
)
return func
def CostCrossEntropy(target):
"""
Return cross entropy cost function valued only at X, so
that it may be easily differentiated
"""
def func(X):
return -(1.0 / target.size) * np.sum(target * np.log(X + 10e-10))
return func
Usage of cost functions
Below we will provide a short example of how these cost function may be used to obtain results if you wish to test them out on your own using AutoGrad's automatic differentiation.
from autograd import grad
target = np.array([[1, 2, 3]]).T
a = np.array([[4, 5, 6]]).T
cost_func = CostCrossEntropy
cost_func_derivative = grad(cost_func(target))
valued_at_a = cost_func_derivative(a)
print(f"Derivative of cost function {cost_func.__name__} valued at a:\n{valued_at_a}")
Activation functions
Finally, before we look at the layers that make up the neural network, we will look at the activation functions which can be specified between the hidden layers and as the output function. Each function can be valued for any given vector or matrix X, and can be differentiated via derivate().
import autograd.numpy as np
from autograd import elementwise_grad
def identity(X):
return X
def sigmoid(X):
try:
return 1.0 / (1 + np.exp(-X))
except FloatingPointError:
return np.where(X > np.zeros(X.shape), np.ones(X.shape), np.zeros(X.shape))
def softmax(X):
X = X - np.max(X, axis=-1, keepdims=True)
delta = 10e-10
return np.exp(X) / (np.sum(np.exp(X), axis=-1, keepdims=True) + delta)
def RELU(X):
return np.where(X > np.zeros(X.shape), X, np.zeros(X.shape))
def LRELU(X):
delta = 10e-4
return np.where(X > np.zeros(X.shape), X, delta * X)
def derivate(func):
if func.__name__ == "RELU":
def func(X):
return np.where(X > 0, 1, 0)
return func
elif func.__name__ == "LRELU":
def func(X):
delta = 10e-4
return np.where(X > 0, 1, delta)
return func
else:
return elementwise_grad(func)
Usage of activation functions
Below we present a short demonstration of how to use an activation function. The derivative of the activation function will be important when calculating the output delta term during backpropagation. Note that derivate() can also be used for cost functions for a more generalized approach.
z = np.array([[4, 5, 6]]).T
print(f"Input to activation function:\n{z}")
act_func = sigmoid
a = act_func(z)
print(f"\nOutput from {act_func.__name__} activation function:\n{a}")
act_func_derivative = derivate(act_func)
valued_at_z = act_func_derivative(a)
print(f"\nDerivative of {act_func.__name__} activation function valued at z:\n{valued_at_z}")
Convolution
In order to construct a convolutional neural network (CNN), it is crucial to comprehend the fundamental principles of convolution and how it aids in extracting information from images. Convolution, at its core, is merely a mathematical operation between two functions that yields another function. It is represented by an integral between two functions, which is typically expressed as:
$$
(f \ast g)(t):=\int_{-\infty}^{\infty} f(\tau) g(t-\tau) d \tau.
$$
Here, f and g are the two functions on which we want to perform an operation. The outcome of the convolution operation is represented by \( (f \ast g) \), and it is derived by sliding the function g over f and computing the integral of their product at each position. If both functions are continuous, convolution takes the form shown above. However, if we discretize both f and g, the convolution operation will take the form of a sum between the elements of f and g:
$$
(f \ast g)[n]=\sum_{m=0}^{n-1} f[m] g[n-m].
$$
The key idea we utilize to extract the information contained in an image is to slide an \( m \times n \) matrix g over an \( m \times n \) matrix f. In our case, f represents the image, while g represents the kernel, oftentimes called a filter. However, since our convolution will be a two-dimensional variant, we need to extend our mathematical formula with an additional summation:
$$
(f \ast g)[i, j]\sum_{m=0}^{M-1}\sum_{n=0}^{N-1} f[m,n] g[i-m, j-n].
$$
It is imperative to note that the size of the kernel g is significantly smaller than the size of the input image f, thereby reducing the amount of computation necessary for feature extraction. Furthermore, the kernel is usually a trainable parameter in a convolutional neural network, allowing the network to learn appropriate kernels for specific tasks.
To give you an example of how 2D convolution works in practice, suppose we have an image f of dimension \( 6 \times 6 \)
$$
f = \begin{bmatrix}
4 & 1 & 2 & 9 & 8 & 6 \\
9 & 5 & 9 & 5 & 8 & 5 \\
1 & 5 & 9 & 7 & 6 & 4 \\
2 & 9 & 8 & 3 & 7 & 1 \\
8 & 1 & 6 & 4 & 2 & 2 \\
1 & 0 & 5 & 7 & 8 & 2 \\
\end{bmatrix}
$$
and a \( 3 \times 3 \) kernel g called a low-pass filter. Note that the kernel is usually rotated by 180 degrees during convolution, however this has no effect on this kernel.
$$
g = \frac{1}{9}
\begin{bmatrix}
1 & 1 & 1 \\
1 & 1 & 1 \\
1 & 1 & 1 \\
\end{bmatrix}
$$
In order to filter the image, we have to extract a \( 3 \times 3 \) element from the upper left corner of f, and perform element-wise multiplication of the extracted image pixels with the elements of the kernel g:
$$
\begin{bmatrix}
4 & 1 & 2 \\
9 & 5 & 9 \\
1 & 5 & 9 \\
\end{bmatrix}
\cdot
\begin{bmatrix}
\frac{1}{9} & \frac{1}{9} & \frac{1}{9} \\
\frac{1}{9} & \frac{1}{9} & \frac{1}{9} \\
\frac{1}{9} & \frac{1}{9} & \frac{1}{9} \\
\end{bmatrix}
=
\begin{bmatrix}
\frac{4}{9} & \frac{1}{9} & \frac{2}{9} \\
\frac{9}{9} & \frac{5}{9} & \frac{9}{9} \\
\frac{1}{9} & \frac{5}{9} & \frac{9}{9} \\
\end {bmatrix}
= \textbf{A}
$$
Then, following the multiplication, we summarize all the elements of the resulting matrix A:
$$
(f \ast g)[0, 0]= \sum_{i=0}^{2} \sum_{j=0}^{2} a_{i,j} = 5
$$
Which corresponds to the first element of the filtered image \( (f \ast g) \).
Here we use a stride of 1, a parameter denoted s which describes how many indexes we move the kernel g to the right before repeating the calculations above for the next \( 3 \times 3 \) element of the image f. It is usually presumed that *s*=1, however, larger values for s can be used to reduce the dimentionality of the filtered image such that the convolution operation is more computationally efficient. In the context of a convolutional neural network, this will become very useful.
The full result of the convolution is:
$$
(f \ast g) =
\begin{bmatrix}
5 & 5.78 & 7 & 6.44 \\
6.33 & 6.67 & 6.89 & 5.11 \\
5.44 & 5.78 & 5.78 & 4 \\
4.44 & 4.78 & 5.56 & 4 \\
\end{bmatrix}
$$
The result is markedly smaller in shape than the original image. This occurs when using convolution without first padding the image with additional columns and rows, allowing us to keep the original image shape after sliding the kernel over the image. How many rows and columns we wish to pad the image with depends strictly on the shape of the kernel, as we wish to pad the image with r additional rows and c additional columns.
$$
r =\lfloor \frac{kernel\ height}{2} \rfloor \cdot 2 \\
c =\lfloor \frac{kernel\ width}{2} \rfloor \cdot 2
$$
Note the notation \( \lfloor \frac{kernel width}{2} \rfloor \) means that we floor the result of the division, meaning we round down to a whole number in case \( \frac{kernel width}{2} \) results in a floating point number.
Using those simple equations, we find out by how much we have to extend the dimensions of the original image. Before proceeding, however, we might ask what we shall fill the additional rows and columns with? One of the most common approaches to padding is zero-padding, which as the name suggest, involves filling the rows and columns with zeros. This is the approach that we will be using for this demonstration. If we apply this padding to out original \( 6 \times 6 \) image, the result will be an \( 8 \times 8 \) image as the kernel has a width and height of 3. Note that the original image is encapsuled by the zero-padded rows and columns:
$$
\begin{bmatrix}
0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\
0 & 4 & 1 & 2 & 9 & 8 & 6 & 0 \\
0 & 9 & 5 & 9 & 5 & 8 & 5 & 0 \\
0 & 1 & 5 & 9 & 7 & 6 & 4 & 0 \\
0 & 2 & 9 & 8 & 3 & 7 & 1 & 0 \\
0 & 8 & 1 & 6 & 4 & 2 & 2 & 0 \\
0 & 1 & 0 & 5 & 7 & 8 & 2 & 0 \\
0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\
\]
\end{bmatrix}
$$
Below we have provided code that demonstrates padding and convolution. As you will see when we run the code, the size of the image will remain unchanged when using padding.
import numpy as np
def padding(image, kernel):
# calculate r and c
r = (kernel.shape[0] // 2) * 2
c = (kernel.shape[1] // 2) * 2
# padded image dimensions
padded_height = image.shape[0] + r
padded_width = image.shape[1] + c
# for more readable code
k_half_height = kernel.shape[0] // 2
k_half_width = kernel.shape[1] // 2
# zero matrix with padded dimensions
padded_img = np.zeros((padded_height, padded_width))
# place image into zero matrix
padded_img[k_half_height : padded_height - k_half_height,
k_half_width : padded_width - k_half_width] = image[:, :]
return padded_img
def convolve(original_image, padded_image, kernel, stride=1):
# rotate kernel by 180 degrees
kernel = np.rot90(np.rot90(kernel))
# note that kernel height // 2 is written as 'm'
# and kernel width // 2 as 'n' in the mathematical notation
m = kernel.shape[0] // 2
n = kernel.shape[1] // 2
r = (kernel.shape[0] // 2) * 2
c = (kernel.shape[1] // 2) * 2
# initialize output array
convolved_image = np.zeros(original_image.shape)
image_height = original_image.shape[0]
image_width = original_image.shape[1]
# the convolution
for i in range(m, image_height + m, stride):
for j in range(n, image_width + n, stride):
convolved_image[i-m, j-n] = np.sum(
padded_image[i : i + m, j : j + n]
* kernel
)
return convolved_image
def convolve(image, kernel, stride=1):
for i in range(2):
kernel = np.rot90(kernel)
k_half_height = kernel.shape[0] // 2
k_half_width = kernel.shape[0] // 2
conv_image = np.zeros(image.shape)
pad_image = padding(image, kernel)
for i in range(k_half_height, conv_image.shape[0] + k_half_height, stride):
for j in range(k_half_width, conv_image.shape[1] + k_half_width, stride):
conv_image[i - k_half_height, j - k_half_width] = np.sum(
pad_image[
i - k_half_height : i + k_half_height + 1, j - k_half_width : j + k_half_width + 1
]
* kernel
)
return conv_image
Fun fact: When filtering images, you will see that convolution involves rotating the kernel by 180 degrees. However, this is not the case when applying convolution in a CNN, where the same operation not rotated by 180 degrees is called cross-correlation.
original_image = np.array([[4, 1, 2, 9, 8, 6],
[9, 5, 9, 5, 8, 5],
[1, 5, 9, 7, 6, 4],
[2, 9, 8, 3, 7, 1],
[8, 1, 6, 4, 2, 2],
[1, 0, 5, 7, 8, 2]])
kernel = (1/9)*np.ones((3,3))
print(f"{original_image.shape=}")
# note that convolve() performs padding
convolved_image = convolve(original_image, kernel, stride=1)
print(f"{convolved_image.shape=}")
As you can see, the resulting image is of the same size as the original image. To round of our demonstration of convolution, we will present the results of convolution using commonly used kernels. In a CNN, the values of the kernels are randomly initialized, and then learned during training. These kernels will extract information regarding the picture, such as for example the edge detection filter demonstrated below extracts the edges present in the picture. Of course, there is no guarantee that the CNN will learn an edge detection filter, but this should provide some intuiton as to how the CNN is able to use kernels to make better predictions than a regular feed forward neural network.
# Now an example using a real image and first a gaussian low-pass filter and then a sobel filter
import numpy as np
import imageio.v3 as imageio
import matplotlib.pyplot as plt
import time
def generate_gauss_mask(sigma, K=1):
side = np.ceil(1 + 8 * sigma)
y, x = np.mgrid[-side // 2 + 1 : (side // 2) + 1, -side // 2 + 1 : (side // 2) + 1]
ker_coef = K / (2 * np.pi * sigma**2)
g = np.exp(-((x**2 + y**2) / (2.0 * sigma**2)))
return g, ker_coef
img_path = "data/IMG-2167.JPG"
image_of_cute_dog = imageio.imread(img_path, mode='L')
plt.imshow(image_of_cute_dog, cmap="gray", vmin=0, vmax=255, aspect="auto")
plt.title("Original image")
plt.show()
gauss, kernel = generate_gauss_mask(sigma=6)
gauss_kernel = gauss*kernel
filtered_image = convolve(image_of_cute_dog, gauss_kernel)
plt.imshow(filtered_image, cmap="gray", vmin=0, vmax=255, aspect="auto")
plt.title("Result of convolution with gauss kernel (blurring filter)")
plt.show()
sobel_kernel = np.array([[1, 2, 1],
[0, 0, 0],
[-1, -2, -1]])
filtered_image = convolve(image_of_cute_dog, sobel_kernel)
plt.imshow(filtered_image, cmap="gray", vmin=0, vmax=255, aspect="auto")
plt.title("Result of convolution with sobel kernel (edge detection filter)")
plt.show()
Layers
The code below initialises global variables for readability and describes the abstract class Layers. This is not important in order to understand the CNN, but is benefitial for organizing the code neatly.
import math
import autograd.numpy as np
from copy import deepcopy, copy
from autograd import grad
from typing import Callable
# global variables for index readability
input_index = 0
node_index = 1
bias_index = 1
input_channel_index = 1
feature_maps_index = 1
height_index = 2
width_index = 3
kernel_feature_maps_index = 1
kernel_input_channels_index = 0
class Layer:
def __init__(self, seed):
self.seed = seed
def _feedforward(self):
raise NotImplementedError
def _backpropagate(self):
raise NotImplementedError
def _reset_weights(self, previous_nodes):
raise NotImplementedError
Convolution2DLayer: convolution in a hidden layer
After establishing the foundational understanding of applying convolution to spatial data, let us delve into the intricate workings of a convolutional layer in a Convolutional Neural Network (CNN). The primary function of convolution, as previously discussed, is to extract pertinent information from images while simultaneously decreasing the scale of our data. To initiate the image processing, we shall begin by partitioning the images into color channels (unless the image is grayscale), comprising three primary colors: red, green, and blue. We will subsequently utilize trainable kernels to construct a higher-dimensional encoding of each channel called feature maps. Successive layers will receive these feature maps as inputs, generating further encodings, albeit with reduced dimensions. The term trainable kernels denotes the initialization of pre-defined kernel-shaped weights, which we will then train via backpropagation, similar to how weights are trained in a Feedforward Neural Network.
To ensure seamless integration between our implementation of the convolutional layer and popular machine learning frameworks like Tensorflow (Keras) and PyTorch, we have adopted a design pattern that mirrors the construction of models using these APIs. This involves implementing our convolutional layer as a Python class or object, which allows for a more modular and flexible approach to building neural networks. By structuring our code in this way, users can easily incorporate our implementation into their existing machine learning pipelines without having to make significant changes to their codebase. Additionally, this design pattern promotes code reusability and makes it easier to maintain and update our convolutional layer implementation over time.
Note that the Convolution2DLayer takes in an activation function as a parameter, as it also performs non-linearity.
class Convolution2DLayer(Layer):
def __init__(
self,
input_channels,
feature_maps,
kernel_height,
kernel_width,
v_stride,
h_stride,
pad,
act_func: Callable,
seed=None,
reset_weights_independently=True,
):
super().__init__(seed)
self.input_channels = input_channels
self.feature_maps = feature_maps
self.kernel_height = kernel_height
self.kernel_width = kernel_width
self.v_stride = v_stride
self.h_stride = h_stride
self.pad = pad
self.act_func = act_func
# such that the layer can be used on its own
# outside of the CNN module
if reset_weights_independently == True:
self._reset_weights_independently()
def _feedforward(self, X_batch):
# note that the shape of X_batch = [inputs, input_maps, img_height, img_width]
# pad the input batch
X_batch_padded = self._padding(X_batch)
# calculate height_index and width_index after stride
strided_height = int(np.ceil(X_batch.shape[height_index] / self.v_stride))
strided_width = int(np.ceil(X_batch.shape[width_index] / self.h_stride))
# create output array
output = np.ndarray(
(
X_batch.shape[input_index],
self.feature_maps,
strided_height,
strided_width,
)
)
# save input and output for backpropagation
self.X_batch_feedforward = X_batch
self.output_shape = output.shape
# checking for errors, no need to look here :)
self._check_for_errors()
# convolve input with kernel
for img in range(X_batch.shape[input_index]):
for chin in range(self.input_channels):
for fmap in range(self.feature_maps):
out_h = 0
for h in range(0, X_batch.shape[height_index], self.v_stride):
out_w = 0
for w in range(0, X_batch.shape[width_index], self.h_stride):
output[img, fmap, out_h, out_w] = np.sum(
X_batch_padded[
img,
chin,
h : h + self.kernel_height,
w : w + self.kernel_width,
]
* self.kernel[chin, fmap, :, :]
)
out_w += 1
out_h += 1
# Pay attention to the fact that we're not rotating the kernel by 180 degrees when filtering the image in
# the convolutional layer, as convolution in terms of Machine Learning is a procedure known as cross-correlation
# in image processing and signal processing
# return a
return self.act_func(output / (self.kernel_height))
def _backpropagate(self, delta_term_next):
# intiate matrices
delta_term = np.zeros((self.X_batch_feedforward.shape))
gradient_kernel = np.zeros((self.kernel.shape))
# pad input for convolution
X_batch_padded = self._padding(self.X_batch_feedforward)
# Since an activation function is used at the output of the convolution layer, its derivative
# has to be accounted for in the backpropagation -> as if ReLU was a layer on its own.
act_derivative = derivate(self.act_func)
delta_term_next = act_derivative(delta_term_next)
# fill in 0's for values removed by vertical stride in feedforward
if self.v_stride > 1:
v_ind = 1
for i in range(delta_term_next.shape[height_index]):
for j in range(self.v_stride - 1):
delta_term_next = np.insert(
delta_term_next, v_ind, 0, axis=height_index
)
v_ind += self.v_stride
# fill in 0's for values removed by horizontal stride in feedforward
if self.h_stride > 1:
h_ind = 1
for i in range(delta_term_next.shape[width_index]):
for k in range(self.h_stride - 1):
delta_term_next = np.insert(
delta_term_next, h_ind, 0, axis=width_index
)
h_ind += self.h_stride
# crops out 0-rows and 0-columns
delta_term_next = delta_term_next[
:,
:,
: self.X_batch_feedforward.shape[height_index],
: self.X_batch_feedforward.shape[width_index],
]
# the gradient received from the next layer also needs to be padded
delta_term_next = self._padding(delta_term_next)
# calculate delta term by convolving next delta term with kernel
for img in range(self.X_batch_feedforward.shape[input_index]):
for chin in range(self.input_channels):
for fmap in range(self.feature_maps):
for h in range(self.X_batch_feedforward.shape[height_index]):
for w in range(self.X_batch_feedforward.shape[width_index]):
delta_term[img, chin, h, w] = np.sum(
delta_term_next[
img,
fmap,
h : h + self.kernel_height,
w : w + self.kernel_width,
]
* np.rot90(np.rot90(self.kernel[chin, fmap, :, :]))
)
# calculate gradient for kernel for weight update
# also via convolution
for chin in range(self.input_channels):
for fmap in range(self.feature_maps):
for k_x in range(self.kernel_height):
for k_y in range(self.kernel_width):
gradient_kernel[chin, fmap, k_x, k_y] = np.sum(
X_batch_padded[
img,
chin,
h : h + self.kernel_height,
w : w + self.kernel_width,
]
* delta_term_next[
img,
fmap,
h : h + self.kernel_height,
w : w + self.kernel_width,
]
)
# all kernels are updated with weight gradient of kernel
self.kernel -= gradient_kernel
# return delta term
return delta_term
def _padding(self, X_batch, batch_type="image"):
# same padding for images
if self.pad == "same" and batch_type == "image":
padded_height = X_batch.shape[height_index] + (self.kernel_height // 2) * 2
padded_width = X_batch.shape[width_index] + (self.kernel_width // 2) * 2
half_kernel_height = self.kernel_height // 2
half_kernel_width = self.kernel_width // 2
# initialize padded array
X_batch_padded = np.ndarray(
(
X_batch.shape[input_index],
X_batch.shape[feature_maps_index],
padded_height,
padded_width,
)
)
# zero pad all images in X_batch
for img in range(X_batch.shape[input_index]):
padded_img = np.zeros(
(X_batch.shape[feature_maps_index], padded_height, padded_width)
)
padded_img[
:,
half_kernel_height : padded_height - half_kernel_height,
half_kernel_width : padded_width - half_kernel_width,
] = X_batch[img, :, :, :]
X_batch_padded[img, :, :, :] = padded_img[:, :, :]
return X_batch_padded
# same padding for gradients
elif self.pad == "same" and batch_type == "grad":
padded_height = X_batch.shape[height_index] + (self.kernel_height // 2) * 2
padded_width = X_batch.shape[width_index] + (self.kernel_width // 2) * 2
half_kernel_height = self.kernel_height // 2
half_kernel_width = self.kernel_width // 2
# initialize padded array
delta_term_padded = np.zeros(
(
X_batch.shape[input_index],
X_batch.shape[feature_maps_index],
padded_height,
padded_width,
)
)
# zero pad delta term
delta_term_padded[
:, :, : X_batch.shape[height_index], : X_batch.shape[width_index]
] = X_batch[:, :, :, :]
return delta_term_padded
else:
return X_batch
def _reset_weights_independently(self):
# sets seed to remove randomness inbetween runs
if self.seed is not None:
np.random.seed(self.seed)
# initializes kernel matrix
self.kernel = np.ndarray(
(
self.input_channels,
self.feature_maps,
self.kernel_height,
self.kernel_width,
)
)
# randomly initializes weights
for chin in range(self.kernel.shape[kernel_input_channels_index]):
for fmap in range(self.kernel.shape[kernel_feature_maps_index]):
self.kernel[chin, fmap, :, :] = np.random.rand(
self.kernel_height, self.kernel_width
)
def _reset_weights(self, previous_nodes):
# sets weights
self._reset_weights_independently()
# returns shape of output used for subsequent layer's weight initiation
strided_height = int(
np.ceil(previous_nodes.shape[height_index] / self.v_stride)
)
strided_width = int(np.ceil(previous_nodes.shape[width_index] / self.h_stride))
next_nodes = np.ones(
(
previous_nodes.shape[input_index],
self.feature_maps,
strided_height,
strided_width,
)
)
return next_nodes / self.kernel_height
def _check_for_errors(self):
if self.X_batch_feedforward.shape[input_channel_index] != self.input_channels:
raise AssertionError(
f"ERROR: Number of input channels in data ({self.X_batch_feedforward.shape[input_channel_index]}) is not equal to input channels in Convolution2DLayerOPT ({self.input_channels})! Please change the number of input channels of the Convolution2DLayer such that they are equal"
)
Backpropagation in the convolutional layer
As you may have noticed, we have not yet explained how the backpropagation algorithm works in a convolutional layer. However, having covered all other major details about convolutional layers, we are now prepared to do so. It should come as no surprise that the calculation of delta terms at each convolutional layer takes the form of convolution. After the gradient has been propagated backwards through the flattening layer, where it was reshaped into an appropriate form, calculating the update value for the kernel is simply a matter of convolving the output gradient with the input of the layer for which we are updating the weights. For more detail, this article serves as an excellent resource, see https://pavisj.medium.com/convolutions-and-backpropagations-46026a8f5d2c
Demonstration
We can use the convolutional layer above to perform a simple convolution on an image of the now familiar cute dog.
import numpy as np
import imageio.v3 as imageio
import matplotlib.pyplot as plt
def plot_convolution_result(X, layer):
plt.imshow(X[0, 0, :, :], vmin=0, vmax=255, cmap="gray")
plt.title("Original image")
plt.colorbar()
plt.show()
conv_result = layer._feedforward(X)
plt.title("Result of convolutional layer")
plt.imshow(conv_result[0, 0, :, :], vmin=0, vmax=255, cmap="gray")
plt.colorbar()
plt.show()
# create layer
layer = Convolution2DLayer(
input_channels=3,
feature_maps=1,
kernel_height=4,
kernel_width=4,
v_stride=2,
h_stride=2,
pad="same",
act_func=identity,
seed=2023,
)
# read in image path, make data correct format
img_path = img_path = "data/IMG-2167.JPG"
image_of_cute_dog = imageio.imread(img_path)
image_shape = image_of_cute_dog.shape
image_of_cute_dog = image_of_cute_dog.reshape(1, image_shape[0], image_shape[1], image_shape[2])
image_of_cute_dog = image_of_cute_dog.transpose(0, 3, 1, 2)
# plot the result of the convolution
plot_convolution_result(image_of_cute_dog, layer)
We cobserve that the result has half the pixels on each axis due to the fact that we've used a horizontal and vertical stride of 2. The result of this convolution is not very insightfull, as the kernel has completely random values for the first feedforward pass. However, as we perform multiple forward and backward passes, the results of the convolution should provide identifying features of the image it uses for classification.
Note that image data usually comes in many different shapes and sizes, but for our CNN we require the input data be formatted as \[Number of inputs, input channels, input height, input width\]. Occasionally, the data you come accross use will be formatted like this, but on many occasions reshaping and transposing the dimensions is sadly necessary.
Pooling Layer
The pooling layer is another widely used type of layer in convolutional neural networks that enables data downsampling to a more manageable size. Despite recent technological advancements that allow for convolution without excessive size reduction of the data, the pooling layer still remains a fundamental component of convolutional neural networks. It can be used before, after, or in between convolutional layers, although finding the optimal placement of layers and network depth requires experimentation to achieve the best performance for a given problem. The code we provide allows you to perform two types of pooling known as max pooling and average pooling.
class Pooling2DLayer(Layer):
def __init__(
self,
kernel_height,
kernel_width,
v_stride,
h_stride,
pooling="max",
seed=None,
):
super().__init__(seed)
self.kernel_height = kernel_height
self.kernel_width = kernel_width
self.v_stride = v_stride
self.h_stride = h_stride
self.pooling = pooling
def _feedforward(self, X_batch):
# Saving the input for use in the backwardpass
self.X_batch_feedforward = X_batch
# check if user is silly
self._check_for_errors()
# Computing the size of the feature maps based on kernel size and the stride parameter
strided_height = (
X_batch.shape[height_index] - self.kernel_height
) // self.v_stride + 1
if X_batch.shape[height_index] == X_batch.shape[width_index]:
strided_width = strided_height
else:
strided_width = (
X_batch.shape[width_index] - self.kernel_width
) // self.h_stride + 1
# initialize output array
output = np.ndarray(
(
X_batch.shape[input_index],
X_batch.shape[feature_maps_index],
strided_height,
strided_width,
)
)
# select pooling action, either max or average pooling
if self.pooling == "max":
self.pooling_action = np.max
elif self.pooling == "average":
self.pooling_action = np.mean
# pool based on kernel size and stride
for img in range(output.shape[input_index]):
for fmap in range(output.shape[feature_maps_index]):
for h in range(strided_height):
for w in range(strided_width):
output[img, fmap, h, w] = self.pooling_action(
X_batch[
img,
fmap,
(h * self.v_stride) : (h * self.v_stride)
+ self.kernel_height,
(w * self.h_stride) : (w * self.h_stride)
+ self.kernel_width,
]
)
# output for feedforward in next layer
return output
def _backpropagate(self, delta_term_next):
# initiate delta term array
delta_term = np.zeros((self.X_batch_feedforward.shape))
for img in range(delta_term_next.shape[input_index]):
for fmap in range(delta_term_next.shape[feature_maps_index]):
for h in range(0, delta_term_next.shape[height_index], self.v_stride):
for w in range(
0, delta_term_next.shape[width_index], self.h_stride
):
# max pooling
if self.pooling == "max":
# get window
window = self.X_batch_feedforward[
img,
fmap,
h : h + self.kernel_height,
w : w + self.kernel_width,
]
# find max values indices in window
max_h, max_w = np.unravel_index(
window.argmax(), window.shape
)
# set values in new, upsampled delta term
delta_term[
img,
fmap,
(h + max_h),
(w + max_w),
] += delta_term_next[img, fmap, h, w]
# average pooling
if self.pooling == "average":
delta_term[
img,
fmap,
h : h + self.kernel_height,
w : w + self.kernel_width,
] = (
delta_term_next[img, fmap, h, w]
/ self.kernel_height
/ self.kernel_width
)
# returns input to backpropagation in previous layer
return delta_term
def _reset_weights(self, previous_nodes):
# calculate strided height, strided width
strided_height = (
previous_nodes.shape[height_index] - self.kernel_height
) // self.v_stride + 1
if previous_nodes.shape[height_index] == previous_nodes.shape[width_index]:
strided_width = strided_height
else:
strided_width = (
previous_nodes.shape[width_index] - self.kernel_width
) // self.h_stride + 1
# initiate output array
output = np.ones(
(
previous_nodes.shape[input_index],
previous_nodes.shape[feature_maps_index],
strided_height,
strided_width,
)
)
# returns output with shape used for reset weights in next layer
return output
def _check_for_errors(self):
# check if input is smaller than kernel size -> error
assert (
self.X_batch_feedforward.shape[width_index] >= self.kernel_width
), f"ERROR: Pooling kernel width_index ({self.kernel_width}) larger than data width_index ({self.X_batch_feedforward.input.shape[2]}), please lower the kernel width_index of the Pooling2DLayer"
assert (
self.X_batch_feedforward.shape[height_index] >= self.kernel_height
), f"ERROR: Pooling kernel height_index ({self.kernel_height}) larger than data height_index ({self.X_batch_feedforward.input.shape[3]}), please lower the kernel height_index of the Pooling2DLayer"
Flattening Layer
Before we can begin building our first CNN model, we need to introduce the flattening layer. As its name suggests, the flattening layer transforms the data into a one-dimensional vector that can be fed into the feedforward layers of our network. This layer plays a crucial role in preparing the data for further processing in the network. Additionally, the flattening layer is responsible for reshaping the gradient to the proper shape during backpropagation. This ensures that the kernels are correctly updated, allowing for effective learning in the network.
class FlattenLayer(Layer):
def __init__(self, act_func=LRELU, seed=None):
super().__init__(seed)
self.act_func = act_func
def _feedforward(self, X_batch):
# save input for backpropagation
self.X_batch_feedforward_shape = X_batch.shape
# Remember, the data has the following shape: (I, FM, H, W, ) in the convolutional layers
# whilst the data has the shape (I, FM * H * W) in the fully connected layers
# I = Inputs, FM = Feature Maps, H = Height and W = Width.
X_batch = X_batch.reshape(
X_batch.shape[input_index],
X_batch.shape[feature_maps_index]
* X_batch.shape[height_index]
* X_batch.shape[width_index],
)
# add bias to a
self.z_matrix = X_batch
bias = np.ones((X_batch.shape[input_index], 1)) * 0.01
self.a_matrix = np.hstack([bias, X_batch])
# return a, the input to feedforward in next layer
return self.a_matrix
def _backpropagate(self, weights_next, delta_term_next):
activation_derivative = derivate(self.act_func)
# calculate delta term
delta_term = (
weights_next[bias_index:, :] @ delta_term_next.T
).T * activation_derivative(self.z_matrix)
# FlattenLayer does not update weights
# reshapes delta layer to convolutional layer data format [Input, Feature_Maps, Height, Width]
return delta_term.reshape(self.X_batch_feedforward_shape)
def _reset_weights(self, previous_nodes):
# note that the previous nodes to the FlattenLayer are from the convolutional layers
previous_nodes = previous_nodes.reshape(
previous_nodes.shape[input_index],
previous_nodes.shape[feature_maps_index]
* previous_nodes.shape[height_index]
* previous_nodes.shape[width_index],
)
# return shape used in reset_weights in next layer
return previous_nodes.shape[node_index]
def get_prev_a(self):
return self.a_matrix
Fully Connected Layers
Finally, the result from the flatten layer will pass to a series of fully connected layers, which function as a normal feed forward neural network. The fully connected layers are split into two classes; FullyConnectedLayer which acts as a hidden layer, and OutputLayer, which acts as the single output layer at the end of the CNN. If one wishes to use this codebase to construct a normal feed forward neural network, it must start with a FlattenLayer due to techincal details regarding weight intitialization. However many FullyConnectedLayers can be added to the CNN, and in each layer the amount of nodes, which activation function and scheduler to use can be specified. In practice, the scheduler will be specified in the CNN object initialization, and inherited if no other scheduler is specified.
class FullyConnectedLayer(Layer):
# FullyConnectedLayer per default uses LRELU and Adam scheduler
# with an eta of 0.0001, rho of 0.9 and rho2 of 0.999
def __init__(
self,
nodes: int,
act_func: Callable = LRELU,
scheduler: Scheduler = Adam(eta=1e-4, rho=0.9, rho2=0.999),
seed: int = None,
):
super().__init__(seed)
self.nodes = nodes
self.act_func = act_func
self.scheduler_weight = copy(scheduler)
self.scheduler_bias = copy(scheduler)
# initiate matrices for later
self.weights = None
self.a_matrix = None
self.z_matrix = None
def _feedforward(self, X_batch):
# calculate z
self.z_matrix = X_batch @ self.weights
# calculate a, add bias
bias = np.ones((X_batch.shape[input_index], 1)) * 0.01
self.a_matrix = self.act_func(self.z_matrix)
self.a_matrix = np.hstack([bias, self.a_matrix])
# return a, the input for feedforward in next layer
return self.a_matrix
def _backpropagate(self, weights_next, delta_term_next, a_previous, lam):
# take the derivative of the activation function
activation_derivative = derivate(self.act_func)
# calculate the delta term
delta_term = (
weights_next[bias_index:, :] @ delta_term_next.T
).T * activation_derivative(self.z_matrix)
# intitiate matrix to store gradient
# note that we exclude the bias term, which we will calculate later
gradient_weights = np.zeros(
(
a_previous.shape[input_index],
a_previous.shape[node_index] - bias_index,
delta_term.shape[node_index],
)
)
# calculate gradient = delta term * previous a
for i in range(len(delta_term)):
gradient_weights[i, :, :] = np.outer(
a_previous[i, bias_index:], delta_term[i, :]
)
# sum the gradient, divide by input_index
gradient_weights = np.mean(gradient_weights, axis=input_index)
# for the bias gradient we do not multiply by previous a
gradient_bias = np.mean(delta_term, axis=input_index).reshape(
1, delta_term.shape[node_index]
)
# regularization term
gradient_weights += self.weights[bias_index:, :] * lam
# send gradients into scheduler
# returns update matrix which will be used to update the weights and bias
update_matrix = np.vstack(
[
self.scheduler_bias.update_change(gradient_bias),
self.scheduler_weight.update_change(gradient_weights),
]
)
# update weights
self.weights -= update_matrix
# return weights and delta term, input for backpropagation in previous layer
return self.weights, delta_term
def _reset_weights(self, previous_nodes):
# sets seed to remove randomness inbetween runs
if self.seed is not None:
np.random.seed(self.seed)
# add bias, initiate random weights
bias = 1
self.weights = np.random.randn(previous_nodes + bias, self.nodes)
# returns number of nodes, used for reset_weights in next layer
return self.nodes
def _reset_scheduler(self):
# resets scheduler per epoch
self.scheduler_weight.reset()
self.scheduler_bias.reset()
def get_prev_a(self):
# returns a matrix, used in backpropagation
return self.a_matrix
class OutputLayer(FullyConnectedLayer):
def __init__(
self,
nodes: int,
output_func: Callable = LRELU,
cost_func: Callable = CostCrossEntropy,
scheduler: Scheduler = Adam(eta=1e-4, rho=0.9, rho2=0.999),
seed: int = None,
):
super().__init__(nodes, output_func, copy(scheduler), seed)
self.cost_func = cost_func
# initiate matrices for later
self.weights = None
self.a_matrix = None
self.z_matrix = None
# decides if the output layer performs binary or multi-class classification
self._set_pred_format()
def _feedforward(self, X_batch: np.ndarray):
# calculate a, z
# note that bias is not added as this would create an extra output class
self.z_matrix = X_batch @ self.weights
self.a_matrix = self.act_func(self.z_matrix)
# returns prediction
return self.a_matrix
def _backpropagate(self, target, a_previous, lam):
# note that in the OutputLayer the activation function is the output function
activation_derivative = derivate(self.act_func)
# calculate output delta terms
# for multi-class or binary classification
if self.pred_format == "Multi-class":
delta_term = self.a_matrix - target
else:
cost_func_derivative = grad(self.cost_func(target))
delta_term = activation_derivative(self.z_matrix) * cost_func_derivative(
self.a_matrix
)
# intiate matrix that stores gradient
gradient_weights = np.zeros(
(
a_previous.shape[input_index],
a_previous.shape[node_index] - bias_index,
delta_term.shape[node_index],
)
)
# calculate gradient = delta term * previous a
for i in range(len(delta_term)):
gradient_weights[i, :, :] = np.outer(
a_previous[i, bias_index:], delta_term[i, :]
)
# sum the gradient, divide by input_index
gradient_weights = np.mean(gradient_weights, axis=input_index)
# for the bias gradient we do not multiply by previous a
gradient_bias = np.mean(delta_term, axis=input_index).reshape(
1, delta_term.shape[node_index]
)
# regularization term
gradient_weights += self.weights[bias_index:, :] * lam
# send gradients into scheduler
# returns update matrix which will be used to update the weights and bias
update_matrix = np.vstack(
[
self.scheduler_bias.update_change(gradient_bias),
self.scheduler_weight.update_change(gradient_weights),
]
)
# update weights
self.weights -= update_matrix
# return weights and delta term, input for backpropagation in previous layer
return self.weights, delta_term
def _reset_weights(self, previous_nodes):
# sets seed to remove randomness inbetween runs
if self.seed is not None:
np.random.seed(self.seed)
# add bias, initiate random weights
bias = 1
self.weights = np.random.rand(previous_nodes + bias, self.nodes)
# returns number of nodes, used for reset_weights in next layer
return self.nodes
def _reset_scheduler(self):
# resets scheduler per epoch
self.scheduler_weight.reset()
self.scheduler_bias.reset()
def _set_pred_format(self):
# sets prediction format to either regression, binary or multi-class classification
if self.act_func.__name__ is None or self.act_func.__name__ == "identity":
self.pred_format = "Regression"
elif self.act_func.__name__ == "sigmoid" or self.act_func.__name__ == "tanh":
self.pred_format = "Binary"
else:
self.pred_format = "Multi-class"
def get_pred_format(self):
# returns format of prediction
return self.pred_format
Optimized Convolution2DLayer
For our CNN, we have also implemented an optimized version of the Convolution2DLayer, Convolution2DLayerOPT, which runs much faster. See VII. Remarks for discussion. This layer will per default be used by the CNN due to its computational advantages, but is much less readable. We've documented it such that specially interested students can understand the principles behind it, but it is not recommended to read. In short, we reshape and transpose parts of the image such that the convolutional operation can be swapped out for a simple matrix multiplication.
class Convolution2DLayerOPT(Convolution2DLayer):
"""
Am optimized version of the convolution layer above which
utilizes an approach of extracting windows of size equivalent
in size to the filter. The convoution is then performed on those
windows instead of a full feature map.
"""
def __init__(
self,
input_channels,
feature_maps,
kernel_height,
kernel_width,
v_stride,
h_stride,
pad,
act_func: Callable,
seed=None,
reset_weights_independently=True,
):
super().__init__(
input_channels,
feature_maps,
kernel_height,
kernel_width,
v_stride,
h_stride,
pad,
act_func,
seed,
)
# true if layer is used outside of CNN
if reset_weights_independently == True:
self._reset_weights_independently()
def _feedforward(self, X_batch):
# The optimized _feedforward method is difficult to understand but computationally more efficient
# for a more "by the book" approach, please look at the _feedforward method of Convolution2DLayer
# save the input for backpropagation
self.X_batch_feedforward = X_batch
# check that there are the correct amount of input channels
self._check_for_errors()
# calculate new shape after stride
strided_height = int(np.ceil(X_batch.shape[height_index] / self.v_stride))
strided_width = int(np.ceil(X_batch.shape[width_index] / self.h_stride))
# get windows of the image for more computationally efficient convolution
# the idea is that we want to align the dimensions that we wish to matrix
# multiply, then use a simple matrix multiplication instead of convolution.
# then, we reshape the size back to its intended shape
windows = self._extract_windows(X_batch)
windows = windows.transpose(1, 0, 2, 3, 4).reshape(
X_batch.shape[input_index],
strided_height * strided_width,
-1,
)
# reshape the kernel for more computationally efficient convolution
kernel = self.kernel
kernel = kernel.transpose(0, 2, 3, 1).reshape(
kernel.shape[kernel_input_channels_index]
* kernel.shape[height_index]
* kernel.shape[width_index],
-1,
)
# use simple matrix calculation to obtain output
output = (
(windows @ kernel)
.reshape(
X_batch.shape[input_index],
strided_height,
strided_width,
-1,
)
.transpose(0, 3, 1, 2)
)
# The output is reshaped and rearranged to appropriate shape
return self.act_func(
output / (self.kernel_height * X_batch.shape[feature_maps_index])
)
def _backpropagate(self, delta_term_next):
# The optimized _backpropagate method is difficult to understand but computationally more efficient
# for a more "by the book" approach, please look at the _backpropagate method of Convolution2DLayer
act_derivative = derivate(self.act_func)
delta_term_next = act_derivative(delta_term_next)
# calculate strided dimensions
strided_height = int(
np.ceil(self.X_batch_feedforward.shape[height_index] / self.v_stride)
)
strided_width = int(
np.ceil(self.X_batch_feedforward.shape[width_index] / self.h_stride)
)
# copy kernel
kernel = self.kernel
# get windows, reshape for matrix multiplication
windows = self._extract_windows(self.X_batch_feedforward, "image").reshape(
self.X_batch_feedforward.shape[input_index]
* strided_height
* strided_width,
-1,
)
# initialize output gradient, reshape and transpose into correct shape
# for matrix multiplication
output_grad_tr = delta_term_next.transpose(0, 2, 3, 1).reshape(
self.X_batch_feedforward.shape[input_index]
* strided_height
* strided_width,
-1,
)
# calculate gradient kernel via simple matrix multiplication and reshaping
gradient_kernel = (
(windows.T @ output_grad_tr)
.reshape(
kernel.shape[kernel_input_channels_index],
kernel.shape[height_index],
kernel.shape[width_index],
kernel.shape[kernel_feature_maps_index],
)
.transpose(0, 3, 1, 2)
)
# for computing the input gradient
windows_out, upsampled_height, upsampled_width = self._extract_windows(
delta_term_next, "grad"
)
# calculate new window dimensions
new_windows_first_dim = (
self.X_batch_feedforward.shape[input_index]
* upsampled_height
* upsampled_width
)
# ceil allows for various asymmetric kernels
new_windows_sec_dim = int(np.ceil(windows_out.size / new_windows_first_dim))
# reshape for matrix multiplication
windows_out = windows_out.transpose(1, 0, 2, 3, 4).reshape(
new_windows_first_dim, new_windows_sec_dim
)
# reshape for matrix multiplication
kernel_reshaped = kernel.reshape(self.input_channels, -1)
# calculating input gradient for next convolutional layer
input_grad = (windows_out @ kernel_reshaped.T).reshape(
self.X_batch_feedforward.shape[input_index],
upsampled_height,
upsampled_width,
kernel.shape[kernel_input_channels_index],
)
input_grad = input_grad.transpose(0, 3, 1, 2)
# Update the weights in the kernel
self.kernel -= gradient_kernel
# Output the gradient to propagate backwards
return input_grad
def _extract_windows(self, X_batch, batch_type="image"):
"""
Receives as input the X_batch with shape (inputs, feature_maps, image_height, image_width)
and extract windows of size kernel_height * kernel_width for every image and every feature_map.
It then returns an np.ndarray of shape (image_height * image_width, inputs, feature_maps, kernel_height, kernel_width)
which will be used either to filter the images in feedforward or to calculate the gradient.
"""
# initialize list of windows
windows = []
if batch_type == "image":
# pad the images
X_batch_padded = self._padding(X_batch, batch_type="image")
img_height, img_width = X_batch_padded.shape[2:]
# For each location in the image...
for h in range(
0,
X_batch.shape[height_index],
self.v_stride,
):
for w in range(
0,
X_batch.shape[width_index],
self.h_stride,
):
# ...obtain an image patch of the original size (strided)
# get window
window = X_batch_padded[
:,
:,
h : h + self.kernel_height,
w : w + self.kernel_width,
]
# append to list of windows
windows.append(window)
# return numpy array instead of list
return np.stack(windows)
# In order to be able to perform backprogagation by the method of window extraction,
# here is a modified approach to extracting the windows which allow for the necessary
# upsampling of the gradient in case the on of the stride parameters is larger than one.
if batch_type == "grad":
# In the case of one of the stride parameters being odd, we have to take some
# extra care in calculating the upsampled size of X_batch. We solve this
# by simply flooring the result of dividing stride by 2.
if self.v_stride < 2 or self.v_stride % 2 == 0:
v_stride = 0
else:
v_stride = int(np.floor(self.v_stride / 2))
if self.h_stride < 2 or self.h_stride % 2 == 0:
h_stride = 0
else:
h_stride = int(np.floor(self.h_stride / 2))
upsampled_height = (X_batch.shape[height_index] * self.v_stride) - v_stride
upsampled_width = (X_batch.shape[width_index] * self.h_stride) - h_stride
# When upsampling, we need to insert rows and columns filled with zeros
# into each feature map. How many of those we have to insert is purely
# dependant on the value of stride parameter in the vertical and horizontal
# direction.
if self.v_stride > 1:
v_ind = 1
for i in range(X_batch.shape[height_index]):
for j in range(self.v_stride - 1):
X_batch = np.insert(X_batch, v_ind, 0, axis=height_index)
v_ind += self.v_stride
if self.h_stride > 1:
h_ind = 1
for i in range(X_batch.shape[width_index]):
for k in range(self.h_stride - 1):
X_batch = np.insert(X_batch, h_ind, 0, axis=width_index)
h_ind += self.h_stride
# Since the insertion of zero-filled rows and columns isn't perfect, we have
# to assure that the resulting feature maps will have the expected upsampled height
# and width by cutting them og at desired dimensions.
X_batch = X_batch[:, :, :upsampled_height, :upsampled_width]
X_batch_padded = self._padding(X_batch, batch_type="grad")
# initialize list of windows
windows = []
# For each location in the image...
for h in range(
0,
X_batch.shape[height_index],
self.v_stride,
):
for w in range(
0,
X_batch.shape[width_index],
self.h_stride,
):
# ...obtain an image patch of the original size (strided)
# get window
window = X_batch_padded[
:, :, h : h + self.kernel_height, w : w + self.kernel_width
]
# append window to list
windows.append(window)
# return numpy array, unsampled dimensions
return np.stack(windows), upsampled_height, upsampled_width
def _check_for_errors(self):
# compares input channels of data to input channels of Convolution2DLayer
if self.X_batch_feedforward.shape[input_channel_index] != self.input_channels:
raise AssertionError(
f"ERROR: Number of input channels in data ({self.X_batch_feedforward.shape[input_channel_index]}) is not equal to input channels in Convolution2DLayerOPT ({self.input_channels})! Please change the number of input channels of the Convolution2DLayer such that they are equal"
)
The Convolutional Neural Network (CNN)
Finally, we present the code for the CNN. The CNN class organizes all the layers, and allows for training on image data.
import math
import autograd.numpy as np
import sys
import warnings
from autograd import grad, elementwise_grad
from random import random, seed
from copy import deepcopy
from typing import Tuple, Callable
from sklearn.utils import resample
warnings.simplefilter("error")
class CNN:
def __init__(
self,
cost_func: Callable = CostCrossEntropy,
scheduler: Scheduler = Adam(eta=1e-4, rho=0.9, rho2=0.999),
seed: int = None,
):
"""
Description:
------------
Instantiates CNN object
Parameters:
------------
I output_func (costFunctions) cost function for feed forward neural network part of CNN,
such as "CostLogReg", "CostOLS" or "CostCrossEntropy"
II scheduler (Scheduler) optional parameter, default set to Adam. Can also be set to other
schedulers such as AdaGrad, Momentum, RMS_prop and Constant. Note that schedulers have
to be instantiated first with proper parameters (for example eta, rho and rho2 for Adam)
III seed (int) used for seeding all random operations
"""
self.layers = list()
self.cost_func = cost_func
self.scheduler = scheduler
self.schedulers_weight = list()
self.schedulers_bias = list()
self.seed = seed
self.pred_format = None
def add_FullyConnectedLayer(
self, nodes: int, act_func=LRELU, scheduler=None
) -> None:
"""
Description:
------------
Add a FullyConnectedLayer to the CNN, i.e. a hidden layer in the feed forward neural
network part of the CNN. Often called a Dense layer in literature
Parameters:
------------
I nodes (int) number of nodes in FullyConnectedLayer
II act_func (activationFunctions) activation function of FullyConnectedLayer,
such as "sigmoid", "RELU", "LRELU", "softmax" or "identity"
III scheduler (Scheduler) optional parameter, default set to Adam. Can also be set to other
schedulers such as AdaGrad, Momentum, RMS_prop and Constant
"""
assert self.layers, "FullyConnectedLayer should follow FlattenLayer in CNN"
if scheduler is None:
scheduler = self.scheduler
layer = FullyConnectedLayer(nodes, act_func, scheduler, self.seed)
self.layers.append(layer)
def add_OutputLayer(self, nodes: int, output_func=sigmoid, scheduler=None) -> None:
"""
Description:
------------
Add an OutputLayer to the CNN, i.e. a the final layer in the feed forward neural
network part of the CNN
Parameters:
------------
I nodes (int) number of nodes in OutputLayer. Set nodes=1 for binary classification and
nodes = number of classes for multi-class classification
II output_func (activationFunctions) activation function for the output layer, such as
"identity" for regression, "sigmoid" for binary classification and "softmax" for multi-class
classification
III scheduler (Scheduler) optional parameter, default set to Adam. Can also be set to other
schedulers such as AdaGrad, Momentum, RMS_prop and Constant
"""
assert self.layers, "OutputLayer should follow FullyConnectedLayer in CNN"
if scheduler is None:
scheduler = self.scheduler
output_layer = OutputLayer(
nodes, output_func, self.cost_func, scheduler, self.seed
)
self.layers.append(output_layer)
self.pred_format = output_layer.get_pred_format()
def add_FlattenLayer(self, act_func=LRELU) -> None:
"""
Description:
------------
Add a FlattenLayer to the CNN, which flattens the image data such that it is formatted to
be used in the feed forward neural network part of the CNN
"""
self.layers.append(FlattenLayer(act_func=act_func, seed=self.seed))
def add_Convolution2DLayer(
self,
input_channels=1,
feature_maps=1,
kernel_height=3,
kernel_width=3,
v_stride=1,
h_stride=1,
pad="same",
act_func=LRELU,
optimized=True,
) -> None:
"""
Description:
------------
Add a Convolution2DLayer to the CNN, i.e. a convolutional layer with a 2 dimensional kernel. Should be
the first layer added to the CNN
Parameters:
------------
I input_channels (int) specifies amount of input channels. For monochrome images, use input_channels
= 1, and input_channels = 3 for colored images, where each channel represents one of R, G and B
II feature_maps (int) amount of feature maps in CNN
III kernel_height (int) height of the kernel, also called 'convolutional filter' in literature
IV kernel_width (int) width of the kernel, also called 'convolutional filter' in literature
V v_stride (int) value of vertical stride for dimentionality reduction
VI h_stride (int) value of horizontal stride for dimentionality reduction
VII pad (str) default = "same" ensures output size is the same as input size (given stride=1)
VIII act_func (activationFunctions) default = "LRELU", nonlinear activation function
IX optimized (bool) default = True, uses Convolution2DLayerOPT if True which is much faster when
compared to Convolution2DLayer, which is a more straightforward, understandable implementation
"""
if optimized:
conv_layer = Convolution2DLayerOPT(
input_channels,
feature_maps,
kernel_height,
kernel_width,
v_stride,
h_stride,
pad,
act_func,
self.seed,
reset_weights_independently=False,
)
else:
conv_layer = Convolution2DLayer(
input_channels,
feature_maps,
kernel_height,
kernel_width,
v_stride,
h_stride,
pad,
act_func,
self.seed,
reset_weights_independently=False,
)
self.layers.append(conv_layer)
def add_PoolingLayer(
self, kernel_height=2, kernel_width=2, v_stride=1, h_stride=1, pooling="max"
) -> None:
"""
Description:
------------
Add a Pooling2DLayer to the CNN, i.e. a pooling layer that reduces the dimentionality of
the image data. It is not necessary to use a Pooling2DLayer when creating a CNN, but it
can be used to speed up the training
Parameters:
------------
I kernel_height (int) height of the kernel used for pooling
II kernel_width (int) width of the kernel used for pooling
III v_stride (int) value of vertical stride for dimentionality reduction
IV h_stride (int) value of horizontal stride for dimentionality reduction
V pooling (str) either "max" or "average", describes type of pooling performed
"""
pooling_layer = Pooling2DLayer(
kernel_height, kernel_width, v_stride, h_stride, pooling, self.seed
)
self.layers.append(pooling_layer)
def fit(
self,
X: np.ndarray,
t: np.ndarray,
epochs: int = 100,
lam: float = 0,
batches: int = 1,
X_val: np.ndarray = None,
t_val: np.ndarray = None,
) -> dict:
"""
Description:
------------
Fits the CNN to input X for a given amount of epochs. Performs feedforward and backpropagation passes,
can utilize batches, regulariziation and validation if desired.
Parameters:
------------
X (numpy array) with input data in format [images, input channels,
image height, image_width]
t (numpy array) target labels for input data
epochs (int) amount of epochs
lam (float) regulariziation term lambda
batches (int) amount of batches input data splits into
X_val (numpy array) validation data
t_val (numpy array) target labels for validation data
Returns:
------------
scores (dict) a dictionary with "train_error", "train_acc", "val_error", val_acc" keys
that contain numpy arrays with float values of all accuracies/errors over all epochs.
Can be used to create plots. Also used to update the progress bar during training
"""
# setup
if self.seed is not None:
np.random.seed(self.seed)
# initialize weights
self._initialize_weights(X)
# create arrays for score metrics
scores = self._initialize_scores(epochs)
assert batches <= t.shape[0]
batch_size = X.shape[0] // batches
try:
for epoch in range(epochs):
for batch in range(batches):
# minibatch gradient descent
# If the for loop has reached the last batch, take all thats left
if batch == batches - 1:
X_batch = X[batch * batch_size :, :, :, :]
t_batch = t[batch * batch_size :, :]
else:
X_batch = X[
batch * batch_size : (batch + 1) * batch_size, :, :, :
]
t_batch = t[batch * batch_size : (batch + 1) * batch_size, :]
self._feedforward(X_batch)
self._backpropagate(t_batch, lam)
# reset schedulers for each epoch (some schedulers pass in this call)
for layer in self.layers:
if isinstance(layer, FullyConnectedLayer):
layer._reset_scheduler()
# computing performance metrics
scores = self._compute_scores(scores, epoch, X, t, X_val, t_val)
# printing progress bar
print_length = self._progress_bar(
epoch,
epochs,
scores,
)
# allows for stopping training at any point and seeing the result
except KeyboardInterrupt:
pass
# visualization of training progression (similiar to tensorflow progression bar)
sys.stdout.write("\r" + " " * print_length)
sys.stdout.flush()
self._progress_bar(
epochs,
epochs,
scores,
)
sys.stdout.write("")
return scores
def _feedforward(self, X_batch) -> np.ndarray:
"""
Description:
------------
Performs the feedforward pass for all layers in the CNN. Called from fit()
"""
a = X_batch
for layer in self.layers:
a = layer._feedforward(a)
return a
def _backpropagate(self, t_batch, lam) -> None:
"""
Description:
------------
Performs backpropagation for all layers in the CNN. Called from fit()
"""
assert len(self.layers) >= 2
reversed_layers = self.layers[::-1]
# for every layer, backwards
for i in range(len(reversed_layers) - 1):
layer = reversed_layers[i]
prev_layer = reversed_layers[i + 1]
# OutputLayer
if isinstance(layer, OutputLayer):
prev_a = prev_layer.get_prev_a()
weights_next, delta_next = layer._backpropagate(t_batch, prev_a, lam)
# FullyConnectedLayer
elif isinstance(layer, FullyConnectedLayer):
assert (
delta_next is not None
), "No OutputLayer to follow FullyConnectedLayer"
assert (
weights_next is not None
), "No OutputLayer to follow FullyConnectedLayer"
prev_a = prev_layer.get_prev_a()
weights_next, delta_next = layer._backpropagate(
weights_next, delta_next, prev_a, lam
)
# FlattenLayer
elif isinstance(layer, FlattenLayer):
assert (
delta_next is not None
), "No FullyConnectedLayer to follow FlattenLayer"
assert (
weights_next is not None
), "No FullyConnectedLayer to follow FlattenLayer"
delta_next = layer._backpropagate(weights_next, delta_next)
# Convolution2DLayer and Convolution2DLayerOPT
elif isinstance(layer, Convolution2DLayer):
assert (
delta_next is not None
), "No FlattenLayer to follow Convolution2DLayer"
delta_next = layer._backpropagate(delta_next)
# Pooling2DLayer
elif isinstance(layer, Pooling2DLayer):
assert delta_next is not None, "No Layer to follow Pooling2DLayer"
delta_next = layer._backpropagate(delta_next)
# Catch error
else:
raise NotImplementedError
def _compute_scores(
self,
scores: dict,
epoch: int,
X: np.ndarray,
t: np.ndarray,
X_val: np.ndarray,
t_val: np.ndarray,
) -> dict:
"""
Description:
------------
Computes scores such as training error, training accuracy, validation error
and validation accuracy for the CNN depending on if a validation set is used
and if the CNN performs classification or regression
Returns:
------------
scores (dict) a dictionary with "train_error", "train_acc", "val_error", val_acc" keys
that contain numpy arrays with float values of all accuracies/errors over all epochs.
Can be used to create plots. Also used to update the progress bar during training
"""
pred_train = self.predict(X)
cost_function_train = self.cost_func(t)
train_error = cost_function_train(pred_train)
scores["train_error"][epoch] = train_error
if X_val is not None and t_val is not None:
cost_function_val = self.cost_func(t_val)
pred_val = self.predict(X_val)
val_error = cost_function_val(pred_val)
scores["val_error"][epoch] = val_error
if self.pred_format != "Regression":
train_acc = self._accuracy(pred_train, t)
scores["train_acc"][epoch] = train_acc
if X_val is not None and t_val is not None:
val_acc = self._accuracy(pred_val, t_val)
scores["val_acc"][epoch] = val_acc
return scores
def _initialize_scores(self, epochs) -> dict:
"""
Description:
------------
Initializes scores such as training error, training accuracy, validation error
and validation accuracy for the CNN
Returns:
------------
A dictionary with "train_error", "train_acc", "val_error", val_acc" keys that
will contain numpy arrays with float values of all accuracies/errors over all epochs
when passed through the _compute_scores() function during fit()
"""
scores = dict()
train_errors = np.empty(epochs)
train_errors.fill(np.nan)
val_errors = np.empty(epochs)
val_errors.fill(np.nan)
train_accs = np.empty(epochs)
train_accs.fill(np.nan)
val_accs = np.empty(epochs)
val_accs.fill(np.nan)
scores["train_error"] = train_errors
scores["val_error"] = val_errors
scores["train_acc"] = train_accs
scores["val_acc"] = val_accs
return scores
def _initialize_weights(self, X: np.ndarray) -> None:
"""
Description:
------------
Initializes weights for all layers in CNN
Parameters:
------------
I X (np.ndarray) input of format [img, feature_maps, height, width]
"""
prev_nodes = X
for layer in self.layers:
prev_nodes = layer._reset_weights(prev_nodes)
def predict(self, X: np.ndarray, *, threshold=0.5) -> np.ndarray:
"""
Description:
------------
Predicts output of input X
Parameters:
------------
I X (np.ndarray) input [img, feature_maps, height, width]
"""
prediction = self._feedforward(X)
if self.pred_format == "Binary":
return np.where(prediction > threshold, 1, 0)
elif self.pred_format == "Multi-class":
class_prediction = np.zeros(prediction.shape)
for i in range(prediction.shape[0]):
class_prediction[i, np.argmax(prediction[i, :])] = 1
return class_prediction
else:
return prediction
def _accuracy(self, prediction: np.ndarray, target: np.ndarray) -> float:
"""
Description:
------------
Calculates accuracy of given prediction to target
Parameters:
------------
I prediction (np.ndarray): output of predict() fuction
(1s and 0s in case of classification, and real numbers in case of regression)
II target (np.ndarray): vector of true values (What the network should predict)
Returns:
------------
A floating point number representing the percentage of correctly classified instances.
"""
assert prediction.size == target.size
return np.average((target == prediction))
def _progress_bar(self, epoch: int, epochs: int, scores: dict) -> int:
"""
Description:
------------
Displays progress of training
"""
progression = epoch / epochs
epoch -= 1
print_length = 40
num_equals = int(progression * print_length)
num_not = print_length - num_equals
arrow = ">" if num_equals > 0 else ""
bar = "[" + "=" * (num_equals - 1) + arrow + "-" * num_not + "]"
perc_print = self._fmt(progression * 100, N=5)
line = f" {bar} {perc_print}% "
for key, score in scores.items():
if np.isnan(score[epoch]) == False:
value = self._fmt(score[epoch], N=4)
line += f"| {key}: {value} "
print(line, end="\r")
return len(line)
def _fmt(self, value: int, N=4) -> str:
"""
Description:
------------
Formats decimal numbers for progress bar
"""
if value > 0:
v = value
elif value < 0:
v = -10 * value
else:
v = 1
n = 1 + math.floor(math.log10(v))
if n >= N - 1:
return str(round(value))
# or overflow
return f"{value:.{N-n-1}f}"
Usage of CNN code
Using the CNN codebase is very simple. We begin by initiating a CNN object, which takes a cost function, a scheduler and a seed as its arguments. If a scheduler is not provided, it will per default initiate an Adam scheduler with eta=1e-4, and if a seed is not provided, the CNN will not be seeded, meaning it will run with a different random seed every run. Below we demonstrate an initiation of our CNN.
adam_scheduler = Adam(eta=1e-3, rho=0.9, rho2=0.999)
cnn = CNN(cost_func=CostCrossEntropy, scheduler=adam_scheduler, seed=2023)
Now that we have our CNN object, we can begin to add layers to it! Many of the add_layer functions have default values, for example add_Convolution2DLayer() has a default v_stride and h_stride of 1. However, these can of course be set to any value you please. Note that the input channels of a subsequent convolutional layer must equal the previous convolutional layer's feature maps.
cnn.add_Convolution2DLayer(
input_channels=1,
feature_maps=1,
kernel_height=3,
kernel_width=3,
act_func=LRELU,
)
cnn.add_FlattenLayer()
cnn.add_FullyConnectedLayer(30, LRELU)
cnn.add_FullyConnectedLayer(20, LRELU)
cnn.add_OutputLayer(10, softmax)
Here we have created a CNN with the following architecture:
- A convolutional layer with 1 input channel, with a kernel height of 2 and a width of 2, which uses LRELU as its non-linearity function. This layer outputs 1 feature map, which feed into the subsequent layer.
- A flatten layer
- A hidden layer with 30 nodes, with LRELU as its activation function
- Another hidden layer but with 20 nodes
- The output layer, with softmax as its activation function and 10 nodes. We use 10 nodes because we will be using a dataset with 10 classes.
Now, before we can train the model, we need to load in our data. We will use the MNIST dataset and use 10000 \( 28 \times 28 images \).
from sklearn.datasets import fetch_openml
from sklearn.model_selection import train_test_split
def onehot(target: np.ndarray):
onehot = np.zeros((target.size, target.max() + 1))
onehot[np.arange(target.size), target] = 1
return onehot
# get dataset
dataset = fetch_openml("mnist_784", parser="auto")
mnist = dataset.data.to_numpy(dtype="float")[:10000, :]
# scale data
for i in range(mnist.shape[1]):
mnist[:, i] /= 255
# reshape to add single input channel to data shape [inputs, input_channels, height, width]
mnist = mnist.reshape(mnist.shape[0], 1, 28, 28)
# one hot encode target as we are doing multi-class classification
target = onehot(np.array([int(i) for i in dataset.target.to_numpy()[:10000]]))
# split into training and validation data
x_train, x_val, y_train, y_val = train_test_split(mnist, target)
Now we may train our model. Note that we can utilize regularization in the CNN by using the lam (lambda) parameter in fit(), and utilize different types of gradient descent by specifying the amount of batches via the batches parameter as shown below.
The functionfit() returns a score dictionary of the training error and accuracy (and validation error and accuracy if a validation set is provided) which can be used to plot the error and accuracy of the model over epochs.
scores = cnn.fit(
x_train,
y_train,
lam=1e-5,
batches=10,
epochs=100,
X_val=x_val,
t_val=y_val,
)
plt.plot(scores["train_acc"], label="Training")
plt.plot(scores["val_acc"], label="Validation")
plt.ylim([0.8,1])
plt.xlabel("Epochs")
plt.ylabel("Accuracy")
plt.legend()
plt.show()
Considering we only trained the model for 100 epochs without any tuning of the hyperparameters, this result is pretty good.
The codebase allows for great flexibility in CNN architectures. Pooling layers can be added before, inbetween or after convolutional layers, but due to the great optimizations made within Convolution2DLayerOPT, we recommend using the v_stride and h_stride parameters in add_Convolution2DLayer() to reduce the dimentionality of the problem as the pooling layer is slow in comparison. To use the unoptimized version of Convolution2DLayer, simply pass optimized=False as an argument in add_Convolution2DLayer().
If one wishes to perform binary classification using the CNN, simply use the cost function 'CostLogReg' when initializing the CNN and use 1 node at the OutputLayer.
Below we have created another, more untraditional architecture using our code to demonstrate its flexibility and different attributes such as asymmetric stride that might become useful when constructing your own CNN.
adam_scheduler = Adam(eta=1e-3, rho=0.9, rho2=0.999)
cnn = CNN(cost_func=CostCrossEntropy, scheduler=adam_scheduler, seed=2023)
cnn.add_Convolution2DLayer(
input_channels=1,
feature_maps=7,
kernel_height=7,
kernel_width=1,
act_func=LRELU,
)
cnn.add_PoolingLayer(
kernel_height=2,
kernel_width=2,
pooling="average",
)
cnn.add_PoolingLayer(
kernel_height=2,
kernel_width=2,
pooling="max",
)
cnn.add_Convolution2DLayer(
input_channels=7,
feature_maps=1,
kernel_height=4,
kernel_width=4,
v_stride=2,
h_stride=3,
act_func=LRELU,
optimized=False,
)
cnn.add_Convolution2DLayer(
input_channels=1,
feature_maps=1,
kernel_height=2,
kernel_width=2,
act_func=sigmoid,
optimized=True,
)
cnn.add_PoolingLayer(
kernel_height=2,
kernel_width=2,
pooling="max"
)
cnn.add_FlattenLayer()
cnn.add_FullyConnectedLayer(100, LRELU)
cnn.add_FullyConnectedLayer(10, sigmoid)
cnn.add_FullyConnectedLayer(101, identity)
cnn.add_OutputLayer(10, softmax)
Here we see the use of asymmetrical 1D kernels such as the \( 7 \times 1 \) kernel in the first convolutional layer, both max and average pooling, asymmetric stride in the unoptimized convolutional layer, more pooling, a flatten layer, a hidden layer with 100 nodes using LRELU, another hidden layer with 10 hidden nodes that uses the sigmoid activation function, and another hidden layer with 101 nodes which utilizes no activation function (identity). Finally, we arrive at the output layer with 10 nodes, which uses softmax as its activation function.
Additional Remarks
The stride parameter controls the distance between each convolution and the kernel/filter. If our image is padded, stride is the only parameter that determines the size of the output from a convolutional layer. However, if we decide not to perform any padding, the size of the output feature map depends on both the stride and kernel size. It is important to note that neither the stride nor the kernel has to be symmetrical. This means that we can use a rectangular filter if we choose, and the stride in the vertical direction (axis=0 in Python) does not need to be the same as the stride in the horizontal direction (axis=1 in Python). It may even be the case that asymmetric combinations of stride or kernel dimensions, or both, yield better results than symmetric values for these parameters.
def convolve(image, kernel, stride=1):
for i in range(2):
kernel = np.rot90(kernel)
k_half_height = kernel.shape[0] // 2
k_half_width = kernel.shape[0] // 2
conv_image = np.zeros(image.shape)
pad_image = padding(image, kernel)
for i in range(k_half_height, conv_image.shape[0] + k_half_height, stride):
for j in range(k_half_width, conv_image.shape[1] + k_half_width, stride):
conv_image[i - k_half_height, j - k_half_width] = np.sum(
pad_image[
i - k_half_height : i + k_half_height + 1, j - k_half_width : j + k_half_width + 1
]
* kernel
)
return conv_image
Remarks on the speed
Despite the naive convolution algorithm shown above working finely, it is extremely slow, requiring approximately 20-30 seconds to process a single image. The time complexity of 2D convolution, which is O(NMnm), rapidly becomes a constraint and may, at worst, make computations infeasible. Consequently, optimizing the naive 2D convolution algorithm is a necessity, as the execution time of the algorithm significantly increases as the input data size expands. This can pose a bottleneck in applications that necessitate real-time processing of large data volumes, such as image and video processing, deep learning, and scientific simulations.
To address this issue, we shall present two widely used optimization techniques: the separable kernel approach and Fast Fourier Transform (FFT). Both of these methods can drastically reduce the computational complexity of convolution and enhance the overall efficiency of processing substantial data quantities. While we shall refrain from delving into the intricacies of these algorithms, we strongly encourage you to examine at least the application of FFT to optimize computations.
Convolution using separable kernels
def conv2DSep(image, kernel, coef, stride=1, pad="zero"):
for i in range(2):
kernel = np.rot90(kernel)
# The kernel is quadratic, thus we only need one of its dimensions
half_dim = kernel.shape[0] // 2
ker1 = np.array(kernel[0, :])
ker2 = np.array(kernel[:, 0])
if pad == "zero":
conv_image = np.zeros(image.shape)
pad_image = padding(image, kernel)
else:
conv_image = np.zeros(
(image.shape[0] - kernel.shape[0], image.shape[1] - kernel.shape[1])
)
pad_image = image[:, :]
for i in range(half_dim, conv_image.shape[0] + half_dim, stride):
for j in range(half_dim, conv_image.shape[1] + half_dim, stride):
conv_image[i - half_dim, j - half_dim] = (
pad_image[
i - half_dim : i + half_dim + 1, j - half_dim : j + half_dim + 1
]
@ ker1
@ ker2.T
* coef
)
return conv_image
img_path = img_path = "data/IMG-2167.JPG"
image_of_cute_dog = imageio.imread(img_path, mode="L")
start_time = time.time()
filtered_image = conv2DSep(image_of_cute_dog, kernel=sobel_kernel, coef=1)
print(f'Time taken for convolution with seperated kernel on 128x128 image {time.time() - start_time}')
plt.imshow(filtered_image, cmap="gray", vmin=0, vmax=255, aspect="auto")
plt.show()
By taking advantage of the capabilities of separable kernels, we can effectively cut the computational expense of filtering an image in half. Yet, if we seek even more rapid processing, we can turn to the Fast Fourier Transform (FFT) algorithm provided by the numpy library. By utilizing FFT to transform the input image and filter into the frequency domain, we can perform convolution in this domain. This approach significantly reduces the number of operations needed and results in a marked speedup relative to other convolution techniques. In addition, it is worth noting that the FFT is widely regarded as one of the most critical algorithms developed to date, with applications ranging from digital signal processing to scientific computing.
Convolution in the Fourier domain
start_time = time.time()
img_fft = np.fft.fft2(image_of_cute_dog)
kernel_fft = np.fft.fft2(sobel_kernel, s=image_of_cute_dog.shape)
conv_image = img_fft * kernel_fft
filtered_image = np.fft.ifft2(conv_image)
print(f'Time take for convolution in the fourier domain: {time.time() - start_time}')
plt.imshow(filtered_image.real, cmap="gray", vmin=0, vmax=255, aspect="auto")
plt.show()
It is evident that executing convolution in the Fourier domain yields the quickest computation time. Nonetheless, one should exercise caution, particularly when dealing with images of relatively small dimensions, as one of the other methods may prove to be more expeditious than FFT-enhanced convolution. The overhead involved in transferring both the image and filter into the Fourier domain, followed by their subsequent transformation back into the spatial domain, results in a minor inconvenience. Therefore, it is imperative to remain cognizant of this fact when utilizing FFT as the primary optimization technique.
Recurrent Neural Networks
- Recurrent Neural Networks (RNNs)
- Readings and Videos:
- These lecture notes
- For a more in depth discussion on neural networks we recommend Goodfellow et al chapter 10. See also chapter 11 and 12 on practicalities and applications
- Reading suggestions for implementation of RNNs: Aurelien Geron's chapter 14.
- Video on Recurrent Neural Networks from MIT
- Video on Deep Learning
Recurrent neural networks (RNNs): Overarching view
Till now our focus has been, including convolutional neural networks as well, on feedforward neural networks. The output or the activations flow only in one direction, from the input layer to the output layer.
A recurrent neural network (RNN) looks very much like a feedforward neural network, except that it also has connections pointing backward.
RNNs are used to analyze time series data such as stock prices, and tell you when to buy or sell. In autonomous driving systems, they can anticipate car trajectories and help avoid accidents. More generally, they can work on sequences of arbitrary lengths, rather than on fixed-sized inputs like all the nets we have discussed so far. For example, they can take sentences, documents, or audio samples as input, making them extremely useful for natural language processing systems such as automatic translation and speech-to-text.
A simple example
# Start importing packages
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
import tensorflow as tf
from tensorflow.keras import datasets, layers, models
from tensorflow.keras.layers import Input
from tensorflow.keras.models import Model, Sequential
from tensorflow.keras.layers import Dense, SimpleRNN, LSTM, GRU
from tensorflow.keras import optimizers
from tensorflow.keras import regularizers
from tensorflow.keras.utils import to_categorical
# convert into dataset matrix
def convertToMatrix(data, step):
X, Y =[], []
for i in range(len(data)-step):
d=i+step
X.append(data[i:d,])
Y.append(data[d,])
return np.array(X), np.array(Y)
step = 4
N = 1000
Tp = 800
t=np.arange(0,N)
x=np.sin(0.02*t)+2*np.random.rand(N)
df = pd.DataFrame(x)
df.head()
values=df.values
train,test = values[0:Tp,:], values[Tp:N,:]
# add step elements into train and test
test = np.append(test,np.repeat(test[-1,],step))
train = np.append(train,np.repeat(train[-1,],step))
trainX,trainY =convertToMatrix(train,step)
testX,testY =convertToMatrix(test,step)
trainX = np.reshape(trainX, (trainX.shape[0], 1, trainX.shape[1]))
testX = np.reshape(testX, (testX.shape[0], 1, testX.shape[1]))
model = Sequential()
model.add(SimpleRNN(units=32, input_shape=(1,step), activation="relu"))
model.add(Dense(8, activation="relu"))
model.add(Dense(1))
model.compile(loss='mean_squared_error', optimizer='rmsprop')
model.summary()
model.fit(trainX,trainY, epochs=100, batch_size=16, verbose=2)
trainPredict = model.predict(trainX)
testPredict= model.predict(testX)
predicted=np.concatenate((trainPredict,testPredict),axis=0)
trainScore = model.evaluate(trainX, trainY, verbose=0)
print(trainScore)
plt.plot(df)
plt.plot(predicted)
plt.show()
RNNs
RNNs are very powerful, because they combine two properties:
- Distributed hidden state that allows them to store a lot of information about the past efficiently.
- Non-linear dynamics that allows them to update their hidden state in complicated ways.
With enough neurons and time, RNNs can compute anything that can be computed by your computer!
Basic layout

We need to specify the initial activity state of all the hidden and output units
- We could just fix these initial states to have some default value like 0.5.
- But it is better to treat the initial states as learned parameters.
- We learn them in the same way as we learn the weights.
- Start off with an initial random guess for the initial states.
- At the end of each training sequence, backpropagate through time all the way to the initial states to get the gradient of the error function with respect to each initial state.
- Adjust the initial states by following the negative gradient.
We can specify inputs in several ways
- Specify the initial states of all the units.
- Specify the initial states of a subset of the units.
- Specify the states of the same subset of the units at every time step.
This is the natural way to model most sequential data.
We can specify targets in several ways
- Specify desired final activities of all the units
- Specify desired activities of all units for the last few steps
- Good for learning attractors
- It is easy to add in extra error derivatives as we backpropagate.
- Specify the desired activity of a subset of the units.
- The other units are input or hidden units.




Backpropagation through time
We can think of the recurrent net as a layered, feed-forward net with shared weights and then train the feed-forward net with weight constraints.
We can also think of this training algorithm in the time domain:
- The forward pass builds up a stack of the activities of all the units at each time step.
- The backward pass peels activities off the stack to compute the error derivatives at each time step.
- After the backward pass we add together the derivatives at all the different times for each weight.
The backward pass is linear
- There is a big difference between the forward and backward passes.
- In the forward pass we use squashing functions (like the logistic) to prevent the activity vectors from exploding.
- The backward pass, is completely linear. If you double the error derivatives at the final layer, all the error derivatives will double.
The forward pass determines the slope of the linear function used for backpropagating through each neuron







The problem of exploding or vanishing gradients
- What happens to the magnitude of the gradients as we backpropagate through many layers?
- If the weights are small, the gradients shrink exponentially.
- If the weights are big the gradients grow exponentially.
- Typical feed-forward neural nets can cope with these exponential effects because they only have a few hidden layers.
- In an RNN trained on long sequences (e.g. 100 time steps) the gradients can easily explode or vanish.
- We can avoid this by initializing the weights very carefully.
- Even with good initial weights, its very hard to detect that the current target output depends on an input from many time-steps ago.
RNNs have difficulty dealing with long-range dependencies.
Four effective ways to learn an RNN
- Long Short Term Memory Make the RNN out of little modules that are designed to remember values for a long time.
- Hessian Free Optimization: Deal with the vanishing gradients problem by using a fancy optimizer that can detect directions with a tiny gradient but even smaller curvature.
- Echo State Networks: Initialize the input a hidden and hidden-hidden and output-hidden connections very carefully so that the hidden state has a huge reservoir of weakly coupled oscillators which can be selectively driven by the input.
- ESNs only need to learn the hidden-output connections.
- Good initialization with momentum Initialize like in Echo State Networks, but then learn all of the connections using momentum
Long Short Term Memory (LSTM)
LSTM uses a memory cell for modeling long-range dependencies and avoid vanishing gradient problems.
- Introduced by Hochreiter and Schmidhuber (1997) who solved the problem of getting an RNN to remember things for a long time (like hundreds of time steps).
- They designed a memory cell using logistic and linear units with multiplicative interactions.
- Information gets into the cell whenever its “write” gate is on.
- The information stays in the cell so long as its keep gate is on.
- Information can be read from the cell by turning on its read gate.
Implementing a memory cell in a neural network
To preserve information for a long time in the activities of an RNN, we use a circuit that implements an analog memory cell.
- A linear unit that has a self-link with a weight of 1 will maintain its state.
- Information is stored in the cell by activating its write gate.
- Information is retrieved by activating the read gate.
- We can backpropagate through this circuit because logistics are have nice derivatives.










An extrapolation example
The following code provides an example of how recurrent neural networks can be used to extrapolate to unknown values of physics data sets. Specifically, the data sets used in this program come from a quantum mechanical many-body calculation of energies as functions of the number of particles.
# For matrices and calculations
import numpy as np
# For machine learning (backend for keras)
import tensorflow as tf
# User-friendly machine learning library
# Front end for TensorFlow
import tensorflow.keras
# Different methods from Keras needed to create an RNN
# This is not necessary but it shortened function calls
# that need to be used in the code.
from tensorflow.keras import datasets, layers, models
from tensorflow.keras.layers import Input
from tensorflow.keras import regularizers
from tensorflow.keras.models import Model, Sequential
from tensorflow.keras.layers import Dense, SimpleRNN, LSTM, GRU
# For timing the code
from timeit import default_timer as timer
# For plotting
import matplotlib.pyplot as plt
# The data set
datatype='VaryDimension'
X_tot = np.arange(2, 42, 2)
y_tot = np.array([-0.03077640549, -0.08336233266, -0.1446729567, -0.2116753732, -0.2830637392, -0.3581341341, -0.436462435, -0.5177783846,
-0.6019067271, -0.6887363571, -0.7782028952, -0.8702784034, -0.9649652536, -1.062292565, -1.16231451,
-1.265109911, -1.370782966, -1.479465113, -1.591317992, -1.70653767])
Formatting the Data
The way the recurrent neural networks are trained in this program differs from how machine learning algorithms are usually trained. Typically a machine learning algorithm is trained by learning the relationship between the x data and the y data. In this program, the recurrent neural network will be trained to recognize the relationship in a sequence of y values. This is type of data formatting is typically used time series forcasting, but it can also be used in any extrapolation (time series forecasting is just a specific type of extrapolation along the time axis). This method of data formatting does not use the x data and assumes that the y data are evenly spaced.
For a standard machine learning algorithm, the training data has the form of (x,y) so the machine learning algorithm learns to assiciate a y value with a given x value. This is useful when the test data has x values within the same range as the training data. However, for this application, the x values of the test data are outside of the x values of the training data and the traditional method of training a machine learning algorithm does not work as well. For this reason, the recurrent neural network is trained on sequences of y values of the form ((y1, y2), y3), so that the network is concerned with learning the pattern of the y data and not the relation between the x and y data. As long as the pattern of y data outside of the training region stays relatively stable compared to what was inside the training region, this method of training can produce accurate extrapolations to y values far removed from the training data set.
# FORMAT_DATA
def format_data(data, length_of_sequence = 2):
"""
Inputs:
data(a numpy array): the data that will be the inputs to the recurrent neural
network
length_of_sequence (an int): the number of elements in one iteration of the
sequence patter. For a function approximator use length_of_sequence = 2.
Returns:
rnn_input (a 3D numpy array): the input data for the recurrent neural network. Its
dimensions are length of data - length of sequence, length of sequence,
dimnsion of data
rnn_output (a numpy array): the training data for the neural network
Formats data to be used in a recurrent neural network.
"""
X, Y = [], []
for i in range(len(data)-length_of_sequence):
# Get the next length_of_sequence elements
a = data[i:i+length_of_sequence]
# Get the element that immediately follows that
b = data[i+length_of_sequence]
# Reshape so that each data point is contained in its own array
a = np.reshape (a, (len(a), 1))
X.append(a)
Y.append(b)
rnn_input = np.array(X)
rnn_output = np.array(Y)
return rnn_input, rnn_output
# ## Defining the Recurrent Neural Network Using Keras
#
# The following method defines a simple recurrent neural network in keras consisting of one input layer, one hidden layer, and one output layer.
def rnn(length_of_sequences, batch_size = None, stateful = False):
"""
Inputs:
length_of_sequences (an int): the number of y values in "x data". This is determined
when the data is formatted
batch_size (an int): Default value is None. See Keras documentation of SimpleRNN.
stateful (a boolean): Default value is False. See Keras documentation of SimpleRNN.
Returns:
model (a Keras model): The recurrent neural network that is built and compiled by this
method
Builds and compiles a recurrent neural network with one hidden layer and returns the model.
"""
# Number of neurons in the input and output layers
in_out_neurons = 1
# Number of neurons in the hidden layer
hidden_neurons = 200
# Define the input layer
inp = Input(batch_shape=(batch_size,
length_of_sequences,
in_out_neurons))
# Define the hidden layer as a simple RNN layer with a set number of neurons and add it to
# the network immediately after the input layer
rnn = SimpleRNN(hidden_neurons,
return_sequences=False,
stateful = stateful,
name="RNN")(inp)
# Define the output layer as a dense neural network layer (standard neural network layer)
#and add it to the network immediately after the hidden layer.
dens = Dense(in_out_neurons,name="dense")(rnn)
# Create the machine learning model starting with the input layer and ending with the
# output layer
model = Model(inputs=[inp],outputs=[dens])
# Compile the machine learning model using the mean squared error function as the loss
# function and an Adams optimizer.
model.compile(loss="mean_squared_error", optimizer="adam")
return model
Predicting New Points With A Trained Recurrent Neural Network
def test_rnn (x1, y_test, plot_min, plot_max):
"""
Inputs:
x1 (a list or numpy array): The complete x component of the data set
y_test (a list or numpy array): The complete y component of the data set
plot_min (an int or float): the smallest x value used in the training data
plot_max (an int or float): the largest x valye used in the training data
Returns:
None.
Uses a trained recurrent neural network model to predict future points in the
series. Computes the MSE of the predicted data set from the true data set, saves
the predicted data set to a csv file, and plots the predicted and true data sets w
while also displaying the data range used for training.
"""
# Add the training data as the first dim points in the predicted data array as these
# are known values.
y_pred = y_test[:dim].tolist()
# Generate the first input to the trained recurrent neural network using the last two
# points of the training data. Based on how the network was trained this means that it
# will predict the first point in the data set after the training data. All of the
# brackets are necessary for Tensorflow.
next_input = np.array([[[y_test[dim-2]], [y_test[dim-1]]]])
# Save the very last point in the training data set. This will be used later.
last = [y_test[dim-1]]
# Iterate until the complete data set is created.
for i in range (dim, len(y_test)):
# Predict the next point in the data set using the previous two points.
next = model.predict(next_input)
# Append just the number of the predicted data set
y_pred.append(next[0][0])
# Create the input that will be used to predict the next data point in the data set.
next_input = np.array([[last, next[0]]], dtype=np.float64)
last = next
# Print the mean squared error between the known data set and the predicted data set.
print('MSE: ', np.square(np.subtract(y_test, y_pred)).mean())
# Save the predicted data set as a csv file for later use
name = datatype + 'Predicted'+str(dim)+'.csv'
np.savetxt(name, y_pred, delimiter=',')
# Plot the known data set and the predicted data set. The red box represents the region that was used
# for the training data.
fig, ax = plt.subplots()
ax.plot(x1, y_test, label="true", linewidth=3)
ax.plot(x1, y_pred, 'g-.',label="predicted", linewidth=4)
ax.legend()
# Created a red region to represent the points used in the training data.
ax.axvspan(plot_min, plot_max, alpha=0.25, color='red')
plt.show()
# Check to make sure the data set is complete
assert len(X_tot) == len(y_tot)
# This is the number of points that will be used in as the training data
dim=12
# Separate the training data from the whole data set
X_train = X_tot[:dim]
y_train = y_tot[:dim]
# Generate the training data for the RNN, using a sequence of 2
rnn_input, rnn_training = format_data(y_train, 2)
# Create a recurrent neural network in Keras and produce a summary of the
# machine learning model
model = rnn(length_of_sequences = rnn_input.shape[1])
model.summary()
# Start the timer. Want to time training+testing
start = timer()
# Fit the model using the training data genenerated above using 150 training iterations and a 5%
# validation split. Setting verbose to True prints information about each training iteration.
hist = model.fit(rnn_input, rnn_training, batch_size=None, epochs=150,
verbose=True,validation_split=0.05)
for label in ["loss","val_loss"]:
plt.plot(hist.history[label],label=label)
plt.ylabel("loss")
plt.xlabel("epoch")
plt.title("The final validation loss: {}".format(hist.history["val_loss"][-1]))
plt.legend()
plt.show()
# Use the trained neural network to predict more points of the data set
test_rnn(X_tot, y_tot, X_tot[0], X_tot[dim-1])
# Stop the timer and calculate the total time needed.
end = timer()
print('Time: ', end-start)
Other Things to Try
Changing the size of the recurrent neural network and its parameters can drastically change the results you get from the model. The below code takes the simple recurrent neural network from above and adds a second hidden layer, changes the number of neurons in the hidden layer, and explicitly declares the activation function of the hidden layers to be a sigmoid function. The loss function and optimizer can also be changed but are kept the same as the above network. These parameters can be tuned to provide the optimal result from the network. For some ideas on how to improve the performance of a recurrent neural network.
def rnn_2layers(length_of_sequences, batch_size = None, stateful = False):
"""
Inputs:
length_of_sequences (an int): the number of y values in "x data". This is determined
when the data is formatted
batch_size (an int): Default value is None. See Keras documentation of SimpleRNN.
stateful (a boolean): Default value is False. See Keras documentation of SimpleRNN.
Returns:
model (a Keras model): The recurrent neural network that is built and compiled by this
method
Builds and compiles a recurrent neural network with two hidden layers and returns the model.
"""
# Number of neurons in the input and output layers
in_out_neurons = 1
# Number of neurons in the hidden layer, increased from the first network
hidden_neurons = 500
# Define the input layer
inp = Input(batch_shape=(batch_size,
length_of_sequences,
in_out_neurons))
# Create two hidden layers instead of one hidden layer. Explicitly set the activation
# function to be the sigmoid function (the default value is hyperbolic tangent)
rnn1 = SimpleRNN(hidden_neurons,
return_sequences=True, # This needs to be True if another hidden layer is to follow
stateful = stateful, activation = 'sigmoid',
name="RNN1")(inp)
rnn2 = SimpleRNN(hidden_neurons,
return_sequences=False, activation = 'sigmoid',
stateful = stateful,
name="RNN2")(rnn1)
# Define the output layer as a dense neural network layer (standard neural network layer)
#and add it to the network immediately after the hidden layer.
dens = Dense(in_out_neurons,name="dense")(rnn2)
# Create the machine learning model starting with the input layer and ending with the
# output layer
model = Model(inputs=[inp],outputs=[dens])
# Compile the machine learning model using the mean squared error function as the loss
# function and an Adams optimizer.
model.compile(loss="mean_squared_error", optimizer="adam")
return model
# Check to make sure the data set is complete
assert len(X_tot) == len(y_tot)
# This is the number of points that will be used in as the training data
dim=12
# Separate the training data from the whole data set
X_train = X_tot[:dim]
y_train = y_tot[:dim]
# Generate the training data for the RNN, using a sequence of 2
rnn_input, rnn_training = format_data(y_train, 2)
# Create a recurrent neural network in Keras and produce a summary of the
# machine learning model
model = rnn_2layers(length_of_sequences = 2)
model.summary()
# Start the timer. Want to time training+testing
start = timer()
# Fit the model using the training data genenerated above using 150 training iterations and a 5%
# validation split. Setting verbose to True prints information about each training iteration.
hist = model.fit(rnn_input, rnn_training, batch_size=None, epochs=150,
verbose=True,validation_split=0.05)
# This section plots the training loss and the validation loss as a function of training iteration.
# This is not required for analyzing the couple cluster data but can help determine if the network is
# being overtrained.
for label in ["loss","val_loss"]:
plt.plot(hist.history[label],label=label)
plt.ylabel("loss")
plt.xlabel("epoch")
plt.title("The final validation loss: {}".format(hist.history["val_loss"][-1]))
plt.legend()
plt.show()
# Use the trained neural network to predict more points of the data set
test_rnn(X_tot, y_tot, X_tot[0], X_tot[dim-1])
# Stop the timer and calculate the total time needed.
end = timer()
print('Time: ', end-start)
Other Types of Recurrent Neural Networks
Besides a simple recurrent neural network layer, there are two other commonly used types of recurrent neural network layers: Long Short Term Memory (LSTM) and Gated Recurrent Unit (GRU). For a short introduction to these layers see https://medium.com/mindboard/lstm-vs-gru-experimental-comparison-955820c21e8b and https://medium.com/mindboard/lstm-vs-gru-experimental-comparison-955820c21e8b.
The first network created below is similar to the previous network, but it replaces the SimpleRNN layers with LSTM layers. The second network below has two hidden layers made up of GRUs, which are preceeded by two dense (feeddorward) neural network layers. These dense layers "preprocess" the data before it reaches the recurrent layers. This architecture has been shown to improve the performance of recurrent neural networks (see the link above and also https://arxiv.org/pdf/1807.02857.pdf.
def lstm_2layers(length_of_sequences, batch_size = None, stateful = False):
"""
Inputs:
length_of_sequences (an int): the number of y values in "x data". This is determined
when the data is formatted
batch_size (an int): Default value is None. See Keras documentation of SimpleRNN.
stateful (a boolean): Default value is False. See Keras documentation of SimpleRNN.
Returns:
model (a Keras model): The recurrent neural network that is built and compiled by this
method
Builds and compiles a recurrent neural network with two LSTM hidden layers and returns the model.
"""
# Number of neurons on the input/output layer and the number of neurons in the hidden layer
in_out_neurons = 1
hidden_neurons = 250
# Input Layer
inp = Input(batch_shape=(batch_size,
length_of_sequences,
in_out_neurons))
# Hidden layers (in this case they are LSTM layers instead if SimpleRNN layers)
rnn= LSTM(hidden_neurons,
return_sequences=True,
stateful = stateful,
name="RNN", use_bias=True, activation='tanh')(inp)
rnn1 = LSTM(hidden_neurons,
return_sequences=False,
stateful = stateful,
name="RNN1", use_bias=True, activation='tanh')(rnn)
# Output layer
dens = Dense(in_out_neurons,name="dense")(rnn1)
# Define the midel
model = Model(inputs=[inp],outputs=[dens])
# Compile the model
model.compile(loss='mean_squared_error', optimizer='adam')
# Return the model
return model
def dnn2_gru2(length_of_sequences, batch_size = None, stateful = False):
"""
Inputs:
length_of_sequences (an int): the number of y values in "x data". This is determined
when the data is formatted
batch_size (an int): Default value is None. See Keras documentation of SimpleRNN.
stateful (a boolean): Default value is False. See Keras documentation of SimpleRNN.
Returns:
model (a Keras model): The recurrent neural network that is built and compiled by this
method
Builds and compiles a recurrent neural network with four hidden layers (two dense followed by
two GRU layers) and returns the model.
"""
# Number of neurons on the input/output layers and hidden layers
in_out_neurons = 1
hidden_neurons = 250
# Input layer
inp = Input(batch_shape=(batch_size,
length_of_sequences,
in_out_neurons))
# Hidden Dense (feedforward) layers
dnn = Dense(hidden_neurons/2, activation='relu', name='dnn')(inp)
dnn1 = Dense(hidden_neurons/2, activation='relu', name='dnn1')(dnn)
# Hidden GRU layers
rnn1 = GRU(hidden_neurons,
return_sequences=True,
stateful = stateful,
name="RNN1", use_bias=True)(dnn1)
rnn = GRU(hidden_neurons,
return_sequences=False,
stateful = stateful,
name="RNN", use_bias=True)(rnn1)
# Output layer
dens = Dense(in_out_neurons,name="dense")(rnn)
# Define the model
model = Model(inputs=[inp],outputs=[dens])
# Compile the mdoel
model.compile(loss='mean_squared_error', optimizer='adam')
# Return the model
return model
# Check to make sure the data set is complete
assert len(X_tot) == len(y_tot)
# This is the number of points that will be used in as the training data
dim=12
# Separate the training data from the whole data set
X_train = X_tot[:dim]
y_train = y_tot[:dim]
# Generate the training data for the RNN, using a sequence of 2
rnn_input, rnn_training = format_data(y_train, 2)
# Create a recurrent neural network in Keras and produce a summary of the
# machine learning model
# Change the method name to reflect which network you want to use
model = dnn2_gru2(length_of_sequences = 2)
model.summary()
# Start the timer. Want to time training+testing
start = timer()
# Fit the model using the training data genenerated above using 150 training iterations and a 5%
# validation split. Setting verbose to True prints information about each training iteration.
hist = model.fit(rnn_input, rnn_training, batch_size=None, epochs=150,
verbose=True,validation_split=0.05)
# This section plots the training loss and the validation loss as a function of training iteration.
# This is not required for analyzing the couple cluster data but can help determine if the network is
# being overtrained.
for label in ["loss","val_loss"]:
plt.plot(hist.history[label],label=label)
plt.ylabel("loss")
plt.xlabel("epoch")
plt.title("The final validation loss: {}".format(hist.history["val_loss"][-1]))
plt.legend()
plt.show()
# Use the trained neural network to predict more points of the data set
test_rnn(X_tot, y_tot, X_tot[0], X_tot[dim-1])
# Stop the timer and calculate the total time needed.
end = timer()
print('Time: ', end-start)
# ### Training Recurrent Neural Networks in the Standard Way (i.e. learning the relationship between the X and Y data)
#
# Finally, comparing the performace of a recurrent neural network using the standard data formatting to the performance of the network with time sequence data formatting shows the benefit of this type of data formatting with extrapolation.
# Check to make sure the data set is complete
assert len(X_tot) == len(y_tot)
# This is the number of points that will be used in as the training data
dim=12
# Separate the training data from the whole data set
X_train = X_tot[:dim]
y_train = y_tot[:dim]
# Reshape the data for Keras specifications
X_train = X_train.reshape((dim, 1))
y_train = y_train.reshape((dim, 1))
# Create a recurrent neural network in Keras and produce a summary of the
# machine learning model
# Set the sequence length to 1 for regular data formatting
model = rnn(length_of_sequences = 1)
model.summary()
# Start the timer. Want to time training+testing
start = timer()
# Fit the model using the training data genenerated above using 150 training iterations and a 5%
# validation split. Setting verbose to True prints information about each training iteration.
hist = model.fit(X_train, y_train, batch_size=None, epochs=150,
verbose=True,validation_split=0.05)
# This section plots the training loss and the validation loss as a function of training iteration.
# This is not required for analyzing the couple cluster data but can help determine if the network is
# being overtrained.
for label in ["loss","val_loss"]:
plt.plot(hist.history[label],label=label)
plt.ylabel("loss")
plt.xlabel("epoch")
plt.title("The final validation loss: {}".format(hist.history["val_loss"][-1]))
plt.legend()
plt.show()
# Use the trained neural network to predict the remaining data points
X_pred = X_tot[dim:]
X_pred = X_pred.reshape((len(X_pred), 1))
y_model = model.predict(X_pred)
y_pred = np.concatenate((y_tot[:dim], y_model.flatten()))
# Plot the known data set and the predicted data set. The red box represents the region that was used
# for the training data.
fig, ax = plt.subplots()
ax.plot(X_tot, y_tot, label="true", linewidth=3)
ax.plot(X_tot, y_pred, 'g-.',label="predicted", linewidth=4)
ax.legend()
# Created a red region to represent the points used in the training data.
ax.axvspan(X_tot[0], X_tot[dim], alpha=0.25, color='red')
plt.show()
# Stop the timer and calculate the total time needed.
end = timer()
print('Time: ', end-start)