Data Analysis and Machine Learning: Logistic Regression and Gradient Methods
November 6, 12 and 13, 2023
Logistic Regression
In linear regression our main interest was centered on learning the coefficients of a functional fit (say a polynomial) in order to be able to predict the response of a continuous variable on some unseen data. The fit to the continuous variable \( y_i \) is based on some independent variables \( \boldsymbol{x}_i \). Linear regression resulted in analytical expressions for standard ordinary Least Squares or Ridge regression (in terms of matrices to invert) for several quantities, ranging from the variance and thereby the confidence intervals of the parameters \( \boldsymbol{\beta} \) to the mean squared error. If we can invert the product of the design matrices, linear regression gives then a simple recipe for fitting our data.
Classification problems
Classification problems, however, are concerned with outcomes taking the form of discrete variables (i.e. categories). We may for example, on the basis of DNA sequencing for a number of patients, like to find out which mutations are important for a certain disease; or based on scans of various patients' brains, figure out if there is a tumor or not; or given a specific physical system, we'd like to identify its state, say whether it is an ordered or disordered system (typical situation in solid state physics); or classify the status of a patient, whether she/he has a stroke or not and many other similar situations.
The most common situation we encounter when we apply logistic regression is that of two possible outcomes, normally denoted as a binary outcome, true or false, positive or negative, success or failure etc.
Optimization and Deep learning
Logistic regression will also serve as our stepping stone towards neural network algorithms and supervised deep learning. For logistic learning, the minimization of the cost function leads to a non-linear equation in the parameters \( \boldsymbol{\beta} \). The optimization of the problem calls therefore for minimization algorithms. This forms the bottle neck of all machine learning algorithms, namely how to find reliable minima of a multi-variable function. This leads us to the family of gradient descent methods. The latter are the working horses of basically all modern machine learning algorithms.
We note also that many of the topics discussed here on logistic regression are also commonly used in modern supervised Deep Learning models, as we will see later.
Basics
We consider the case where the dependent variables, also called the responses or the outcomes, \( y_i \) are discrete and only take values from \( k=0,\dots,K-1 \) (i.e. \( K \) classes).
The goal is to predict the output classes from the design matrix \( \boldsymbol{X}\in\mathbb{R}^{n\times p} \) made of \( n \) samples, each of which carries \( p \) features or predictors. The primary goal is to identify the classes to which new unseen samples belong.
Let us specialize to the case of two classes only, with outputs \( y_i=0 \) and \( y_i=1 \). Our outcomes could represent the status of a credit card user that could default or not on her/his credit card debt. That is
$$ y_i = \begin{bmatrix} 0 & \mathrm{no}\\ 1 & \mathrm{yes} \end{bmatrix}. $$Linear classifier
Before moving to the logistic model, let us try to use our linear regression model to classify these two outcomes. We could for example fit a linear model to the default case if \( y_i > 0.5 \) and the no default case \( y_i \leq 0.5 \).
We would then have our weighted linear combination, namely
$$ \begin{equation} \boldsymbol{y} = \boldsymbol{X}^T\boldsymbol{\beta} + \boldsymbol{\epsilon}, \label{_auto1} \end{equation} $$where \( \boldsymbol{y} \) is a vector representing the possible outcomes, \( \boldsymbol{X} \) is our \( n\times p \) design matrix and \( \boldsymbol{\beta} \) represents our estimators/predictors.
Some selected properties
The main problem with our function is that it takes values on the entire real axis. In the case of logistic regression, however, the labels \( y_i \) are discrete variables. A typical example is the credit card data discussed below here, where we can set the state of defaulting the debt to \( y_i=1 \) and not to \( y_i=0 \) for one the persons in the data set (see the full example below).
One simple way to get a discrete output is to have sign functions that map the output of a linear regressor to values \( \{0,1\} \), \( f(s_i)=sign(s_i)=1 \) if \( s_i\ge 0 \) and 0 if otherwise. We will encounter this model in our first demonstration of neural networks.
Historically it is called the perceptron model in the machine learning literature. This model is extremely simple. However, in many cases it is more favorable to use a ``soft" classifier that outputs the probability of a given category. This leads us to the logistic function.
Simple example
The following example on data for coronary heart disease (CHD) as function of age may serve as an illustration. In the code here we read and plot whether a person has had CHD (output = 1) or not (output = 0). This ouput is plotted the person's against age. Clearly, the figure shows that attempting to make a standard linear regression fit may not be very meaningful.
# Common imports
import os
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from sklearn.linear_model import LinearRegression, Ridge, Lasso
from sklearn.model_selection import train_test_split
from sklearn.utils import resample
from sklearn.metrics import mean_squared_error
from IPython.display import display
from pylab import plt, mpl
plt.style.use('seaborn')
mpl.rcParams['font.family'] = 'serif'
# Where to save the figures and data files
PROJECT_ROOT_DIR = "Results"
FIGURE_ID = "Results/FigureFiles"
DATA_ID = "DataFiles/"
if not os.path.exists(PROJECT_ROOT_DIR):
os.mkdir(PROJECT_ROOT_DIR)
if not os.path.exists(FIGURE_ID):
os.makedirs(FIGURE_ID)
if not os.path.exists(DATA_ID):
os.makedirs(DATA_ID)
def image_path(fig_id):
return os.path.join(FIGURE_ID, fig_id)
def data_path(dat_id):
return os.path.join(DATA_ID, dat_id)
def save_fig(fig_id):
plt.savefig(image_path(fig_id) + ".png", format='png')
infile = open(data_path("chddata.csv"),'r')
# Read the chd data as csv file and organize the data into arrays with age group, age, and chd
chd = pd.read_csv(infile, names=('ID', 'Age', 'Agegroup', 'CHD'))
chd.columns = ['ID', 'Age', 'Agegroup', 'CHD']
output = chd['CHD']
age = chd['Age']
agegroup = chd['Agegroup']
numberID = chd['ID']
display(chd)
plt.scatter(age, output, marker='o')
plt.axis([18,70.0,-0.1, 1.2])
plt.xlabel(r'Age')
plt.ylabel(r'CHD')
plt.title(r'Age distribution and Coronary heart disease')
plt.show()
Plotting the mean value for each group
What we could attempt however is to plot the mean value for each group.
agegroupmean = np.array([0.1, 0.133, 0.250, 0.333, 0.462, 0.625, 0.765, 0.800])
group = np.array([1, 2, 3, 4, 5, 6, 7, 8])
plt.plot(group, agegroupmean, "r-")
plt.axis([0,9,0, 1.0])
plt.xlabel(r'Age group')
plt.ylabel(r'CHD mean values')
plt.title(r'Mean values for each age group')
plt.show()
We are now trying to find a function \( f(y\vert x) \), that is a function which gives us an expected value for the output \( y \) with a given input \( x \). In standard linear regression with a linear dependence on \( x \), we would write this in terms of our model
$$ f(y_i\vert x_i)=\beta_0+\beta_1 x_i. $$This expression implies however that \( f(y_i\vert x_i) \) could take any value from minus infinity to plus infinity. If we however let \( f(y\vert y) \) be represented by the mean value, the above example shows us that we can constrain the function to take values between zero and one, that is we have \( 0 \le f(y_i\vert x_i) \le 1 \). Looking at our last curve we see also that it has an S-shaped form. This leads us to a very popular model for the function \( f \), namely the so-called Sigmoid function or logistic model. We will consider this function as representing the probability for finding a value of \( y_i \) with a given \( x_i \).
The logistic function
Another widely studied model, is the so-called perceptron model, which is an example of a "hard classification" model. We will encounter this model when we discuss neural networks as well. Each datapoint is deterministically assigned to a category (i.e \( y_i=0 \) or \( y_i=1 \)). In many cases, and the coronary heart disease data forms one of many such examples, it is favorable to have a "soft" classifier that outputs the probability of a given category rather than a single value. For example, given \( x_i \), the classifier outputs the probability of being in a category \( k \). Logistic regression is the most common example of a so-called soft classifier. In logistic regression, the probability that a data point \( x_i \) belongs to a category \( y_i=\{0,1\} \) is given by the so-called logit function (or Sigmoid) which is meant to represent the likelihood for a given event,
$$ p(t) = \frac{1}{1+\mathrm \exp{-t}}=\frac{\exp{t}}{1+\mathrm \exp{t}}. $$Note that \( 1-p(t)= p(-t) \).
Examples of likelihood functions used in logistic regression and nueral networks
The following code plots the logistic function, the step function and other functions we will encounter from here and on.
"""The sigmoid function (or the logistic curve) is a
function that takes any real number, z, and outputs a number (0,1).
It is useful in neural networks for assigning weights on a relative scale.
The value z is the weighted sum of parameters involved in the learning algorithm."""
import numpy
import matplotlib.pyplot as plt
import math as mt
z = numpy.arange(-5, 5, .1)
sigma_fn = numpy.vectorize(lambda z: 1/(1+numpy.exp(-z)))
sigma = sigma_fn(z)
fig = plt.figure()
ax = fig.add_subplot(111)
ax.plot(z, sigma)
ax.set_ylim([-0.1, 1.1])
ax.set_xlim([-5,5])
ax.grid(True)
ax.set_xlabel('z')
ax.set_title('sigmoid function')
plt.show()
"""Step Function"""
z = numpy.arange(-5, 5, .02)
step_fn = numpy.vectorize(lambda z: 1.0 if z >= 0.0 else 0.0)
step = step_fn(z)
fig = plt.figure()
ax = fig.add_subplot(111)
ax.plot(z, step)
ax.set_ylim([-0.5, 1.5])
ax.set_xlim([-5,5])
ax.grid(True)
ax.set_xlabel('z')
ax.set_title('step function')
plt.show()
"""tanh Function"""
z = numpy.arange(-2*mt.pi, 2*mt.pi, 0.1)
t = numpy.tanh(z)
fig = plt.figure()
ax = fig.add_subplot(111)
ax.plot(z, t)
ax.set_ylim([-1.0, 1.0])
ax.set_xlim([-2*mt.pi,2*mt.pi])
ax.grid(True)
ax.set_xlabel('z')
ax.set_title('tanh function')
plt.show()
Two parameters
We assume now that we have two classes with \( y_i \) either \( 0 \) or \( 1 \). Furthermore we assume also that we have only two parameters \( \beta \) in our fitting of the Sigmoid function, that is we define probabilities
$$ \begin{align*} p(y_i=1|x_i,\boldsymbol{\beta}) &= \frac{\exp{(\beta_0+\beta_1x_i)}}{1+\exp{(\beta_0+\beta_1x_i)}},\nonumber\\ p(y_i=0|x_i,\boldsymbol{\beta}) &= 1 - p(y_i=1|x_i,\boldsymbol{\beta}), \end{align*} $$where \( \boldsymbol{\beta} \) are the weights we wish to extract from data, in our case \( \beta_0 \) and \( \beta_1 \).
Note that we used
$$ p(y_i=0\vert x_i, \boldsymbol{\beta}) = 1-p(y_i=1\vert x_i, \boldsymbol{\beta}). $$Maximum likelihood
In order to define the total likelihood for all possible outcomes from a dataset \( \mathcal{D}=\{(y_i,x_i)\} \), with the binary labels \( y_i\in\{0,1\} \) and where the data points are drawn independently, we use the so-called Maximum Likelihood Estimation (MLE) principle. We aim thus at maximizing the probability of seeing the observed data. We can then approximate the likelihood in terms of the product of the individual probabilities of a specific outcome \( y_i \), that is
$$ \begin{align*} P(\mathcal{D}|\boldsymbol{\beta})& = \prod_{i=1}^n \left[p(y_i=1|x_i,\boldsymbol{\beta})\right]^{y_i}\left[1-p(y_i=1|x_i,\boldsymbol{\beta}))\right]^{1-y_i}\nonumber \\ \end{align*} $$from which we obtain the log-likelihood and our cost/loss function
$$ \mathcal{C}(\boldsymbol{\beta}) = \sum_{i=1}^n \left( y_i\log{p(y_i=1|x_i,\boldsymbol{\beta})} + (1-y_i)\log\left[1-p(y_i=1|x_i,\boldsymbol{\beta}))\right]\right). $$The cost function rewritten
Reordering the logarithms, we can rewrite the cost/loss function as
$$ \mathcal{C}(\boldsymbol{\beta}) = \sum_{i=1}^n \left(y_i(\beta_0+\beta_1x_i) -\log{(1+\exp{(\beta_0+\beta_1x_i)})}\right). $$The maximum likelihood estimator is defined as the set of parameters that maximize the log-likelihood where we maximize with respect to \( \beta \). Since the cost (error) function is just the negative log-likelihood, for logistic regression we have that
$$ \mathcal{C}(\boldsymbol{\beta})=-\sum_{i=1}^n \left(y_i(\beta_0+\beta_1x_i) -\log{(1+\exp{(\beta_0+\beta_1x_i)})}\right). $$This equation is known in statistics as the cross entropy. Finally, we note that just as in linear regression, in practice we often supplement the cross-entropy with additional regularization terms, usually \( L_1 \) and \( L_2 \) regularization as we did for Ridge and Lasso regression.
Minimizing the cross entropy
The cross entropy is a convex function of the weights \( \boldsymbol{\beta} \) and, therefore, any local minimizer is a global minimizer.
Minimizing this cost function with respect to the two parameters \( \beta_0 \) and \( \beta_1 \) we obtain
$$ \frac{\partial \mathcal{C}(\boldsymbol{\beta})}{\partial \beta_0} = -\sum_{i=1}^n \left(y_i -\frac{\exp{(\beta_0+\beta_1x_i)}}{1+\exp{(\beta_0+\beta_1x_i)}}\right), $$and
$$ \frac{\partial \mathcal{C}(\boldsymbol{\beta})}{\partial \beta_1} = -\sum_{i=1}^n \left(y_ix_i -x_i\frac{\exp{(\beta_0+\beta_1x_i)}}{1+\exp{(\beta_0+\beta_1x_i)}}\right). $$A more compact expression
Let us now define a vector \( \boldsymbol{y} \) with \( n \) elements \( y_i \), an \( n\times p \) matrix \( \boldsymbol{X} \) which contains the \( x_i \) values and a vector \( \boldsymbol{p} \) of fitted probabilities \( p(y_i\vert x_i,\boldsymbol{\beta}) \). We can rewrite in a more compact form the first derivative of cost function as
$$ \frac{\partial \mathcal{C}(\boldsymbol{\beta})}{\partial \boldsymbol{\beta}} = -\boldsymbol{X}^T\left(\boldsymbol{y}-\boldsymbol{p}\right). $$If we in addition define a diagonal matrix \( \boldsymbol{W} \) with elements \( p(y_i\vert x_i,\boldsymbol{\beta})(1-p(y_i\vert x_i,\boldsymbol{\beta}) \), we can obtain a compact expression of the second derivative as
$$ \frac{\partial^2 \mathcal{C}(\boldsymbol{\beta})}{\partial \boldsymbol{\beta}\partial \boldsymbol{\beta}^T} = \boldsymbol{X}^T\boldsymbol{W}\boldsymbol{X}. $$Extending to more predictors
Within a binary classification problem, we can easily expand our model to include multiple predictors. Our ratio between likelihoods is then with \( p \) predictors
$$ \log{ \frac{p(\boldsymbol{\beta}\boldsymbol{x})}{1-p(\boldsymbol{\beta}\boldsymbol{x})}} = \beta_0+\beta_1x_1+\beta_2x_2+\dots+\beta_px_p. $$Here we defined \( \boldsymbol{x}=[1,x_1,x_2,\dots,x_p] \) and \( \boldsymbol{\beta}=[\beta_0, \beta_1, \dots, \beta_p] \) leading to
$$ p(\boldsymbol{\beta}\boldsymbol{x})=\frac{ \exp{(\beta_0+\beta_1x_1+\beta_2x_2+\dots+\beta_px_p)}}{1+\exp{(\beta_0+\beta_1x_1+\beta_2x_2+\dots+\beta_px_p)}}. $$Including more classes
Till now we have mainly focused on two classes, the so-called binary system. Suppose we wish to extend to \( K \) classes. Let us for the sake of simplicity assume we have only two predictors. We have then following model
$$ \log{\frac{p(C=1\vert x)}{p(K\vert x)}} = \beta_{10}+\beta_{11}x_1, $$and
$$ \log{\frac{p(C=2\vert x)}{p(K\vert x)}} = \beta_{20}+\beta_{21}x_1, $$and so on till the class \( C=K-1 \) class
$$ \log{\frac{p(C=K-1\vert x)}{p(K\vert x)}} = \beta_{(K-1)0}+\beta_{(K-1)1}x_1, $$and the model is specified in term of \( K-1 \) so-called log-odds or logit transformations.
More classes
In our discussion of neural networks we will encounter the above again in terms of a slightly modified function, the so-called Softmax function.
The softmax function is used in various multiclass classification methods, such as multinomial logistic regression (also known as softmax regression), multiclass linear discriminant analysis, naive Bayes classifiers, and artificial neural networks. Specifically, in multinomial logistic regression and linear discriminant analysis, the input to the function is the result of \( K \) distinct linear functions, and the predicted probability for the \( k \)-th class given a sample vector \( \boldsymbol{x} \) and a weighting vector \( \boldsymbol{\beta} \) is (with two predictors):
$$ p(C=k\vert \mathbf {x} )=\frac{\exp{(\beta_{k0}+\beta_{k1}x_1)}}{1+\sum_{l=1}^{K-1}\exp{(\beta_{l0}+\beta_{l1}x_1)}}. $$It is easy to extend to more predictors. The final class is
$$ p(C=K\vert \mathbf {x} )=\frac{1}{1+\sum_{l=1}^{K-1}\exp{(\beta_{l0}+\beta_{l1}x_1)}}, $$and they sum to one. Our earlier discussions were all specialized to the case with two classes only. It is easy to see from the above that what we derived earlier is compatible with these equations.
To find the optimal parameters we would typically use a gradient descent method. Newton's method and gradient descent methods are discussed in the material on optimization methods.
Friday September 23
Searching for Optimal Regularization Parameters \( \lambda \)
In project 1, when using Ridge and Lasso regression, we end up searching for the optimal parameter \( \lambda \) which minimizes our selected scores (MSE or \( R2 \) values for example). The brute force approach, as discussed in the code here for Ridge regression, consists in evaluating the MSE as function of different \( \lambda \) values. Based on these calculations, one tries then to determine the value of the hyperparameter \( \lambda \) which results in optimal scores (for example the smallest MSE or an \( R2=1 \)).
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from sklearn.model_selection import train_test_split
from sklearn import linear_model
def MSE(y_data,y_model):
n = np.size(y_model)
return np.sum((y_data-y_model)**2)/n
# A seed just to ensure that the random numbers are the same for every run.
# Useful for eventual debugging.
np.random.seed(2021)
n = 100
x = np.random.rand(n)
y = np.exp(-x**2) + 1.5 * np.exp(-(x-2)**2)+ np.random.randn(n)
Maxpolydegree = 5
X = np.zeros((n,Maxpolydegree-1))
for degree in range(1,Maxpolydegree): #No intercept column
X[:,degree-1] = x**(degree)
# We split the data in test and training data
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2)
# Decide which values of lambda to use
nlambdas = 500
MSERidgePredict = np.zeros(nlambdas)
lambdas = np.logspace(-4, 2, nlambdas)
for i in range(nlambdas):
lmb = lambdas[i]
RegRidge = linear_model.Ridge(lmb)
RegRidge.fit(X_train,y_train)
ypredictRidge = RegRidge.predict(X_test)
MSERidgePredict[i] = MSE(y_test,ypredictRidge)
# Now plot the results
plt.figure()
plt.plot(np.log10(lambdas), MSERidgePredict, 'g--', label = 'MSE SL Ridge Test')
plt.xlabel('log10(lambda)')
plt.ylabel('MSE')
plt.legend()
plt.show()
Here we have performed a rather data greedy calculation as function of the regularization parameter \( \lambda \). There is no resampling here. The latter can easily be added by employing the function RidgeCV instead of just calling the Ridge function. For RidgeCV we need to pass the array of \( \lambda \) values. By inspecting the figure we can in turn determine which is the optimal regularization parameter. This becomes however less functional in the long run.
Grid Search
An alternative is to use the so-called grid search functionality included with the library Scikit-Learn, as demonstrated for the same example here.
import numpy as np
from sklearn.model_selection import train_test_split
from sklearn.linear_model import Ridge
from sklearn.model_selection import GridSearchCV
def R2(y_data, y_model):
return 1 - np.sum((y_data - y_model) ** 2) / np.sum((y_data - np.mean(y_data)) ** 2)
def MSE(y_data,y_model):
n = np.size(y_model)
return np.sum((y_data-y_model)**2)/n
# A seed just to ensure that the random numbers are the same for every run.
# Useful for eventual debugging.
np.random.seed(2021)
n = 100
x = np.random.rand(n)
y = np.exp(-x**2) + 1.5 * np.exp(-(x-2)**2)+ np.random.randn(n)
Maxpolydegree = 5
X = np.zeros((n,Maxpolydegree-1))
for degree in range(1,Maxpolydegree): #No intercept column
X[:,degree-1] = x**(degree)
# We split the data in test and training data
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2)
# Decide which values of lambda to use
nlambdas = 10
lambdas = np.logspace(-4, 2, nlambdas)
# create and fit a ridge regression model, testing each alpha
model = Ridge()
gridsearch = GridSearchCV(estimator=model, param_grid=dict(alpha=lambdas))
gridsearch.fit(X_train, y_train)
print(gridsearch)
ypredictRidge = gridsearch.predict(X_test)
# summarize the results of the grid search
print(f"Best estimated lambda-value: {gridsearch.best_estimator_.alpha}")
print(f"MSE score: {MSE(y_test,ypredictRidge)}")
print(f"R2 score: {R2(y_test,ypredictRidge)}")
By default the grid search function includes cross validation with five folds. The Scikit-Learn documentation contains more information on how to set the different parameters.
If we take out the random noise, running the above codes results in \( \lambda=0 \) yielding the best fit.
Randomized Grid Search
An alternative to the above manual grid set up, is to use a random search where the parameters are tuned from a random distribution (uniform below) for a fixed number of iterations. A model is constructed and evaluated for each combination of chosen parameters. We repeat the previous example but now with a random search. Note that values of \( \lambda \) are now limited to be within \( x\in [0,1] \). This domain may not be the most relevant one for the specific case under study.
import numpy as np
from sklearn.model_selection import train_test_split
from sklearn.linear_model import Ridge
from sklearn.model_selection import GridSearchCV
from scipy.stats import uniform as randuniform
from sklearn.model_selection import RandomizedSearchCV
def R2(y_data, y_model):
return 1 - np.sum((y_data - y_model) ** 2) / np.sum((y_data - np.mean(y_data)) ** 2)
def MSE(y_data,y_model):
n = np.size(y_model)
return np.sum((y_data-y_model)**2)/n
# A seed just to ensure that the random numbers are the same for every run.
# Useful for eventual debugging.
np.random.seed(2021)
n = 100
x = np.random.rand(n)
y = np.exp(-x**2) + 1.5 * np.exp(-(x-2)**2)+ np.random.randn(n)
Maxpolydegree = 5
X = np.zeros((n,Maxpolydegree-1))
for degree in range(1,Maxpolydegree): #No intercept column
X[:,degree-1] = x**(degree)
# We split the data in test and training data
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2)
param_grid = {'alpha': randuniform()}
# create and fit a ridge regression model, testing each alpha
model = Ridge()
gridsearch = RandomizedSearchCV(estimator=model, param_distributions=param_grid, n_iter=100)
gridsearch.fit(X_train, y_train)
print(gridsearch)
ypredictRidge = gridsearch.predict(X_test)
# summarize the results of the grid search
print(f"Best estimated lambda-value: {gridsearch.best_estimator_.alpha}")
print(f"MSE score: {MSE(y_test,ypredictRidge)}")
print(f"R2 score: {R2(y_test,ypredictRidge)}")
Wisconsin Cancer Data
We show here how we can use a simple regression case on the breast cancer data using Logistic regression as our algorithm for classification.
import matplotlib.pyplot as plt
import numpy as np
from sklearn.model_selection import train_test_split
from sklearn.datasets import load_breast_cancer
from sklearn.linear_model import LogisticRegression
# Load the data
cancer = load_breast_cancer()
X_train, X_test, y_train, y_test = train_test_split(cancer.data,cancer.target,random_state=0)
print(X_train.shape)
print(X_test.shape)
# Logistic Regression
logreg = LogisticRegression(solver='lbfgs')
logreg.fit(X_train, y_train)
print("Test set accuracy with Logistic Regression: {:.2f}".format(logreg.score(X_test,y_test)))
Using the correlation matrix
In addition to the above scores, we could also study the covariance (and the correlation matrix). We use Pandas to compute the correlation matrix.
import matplotlib.pyplot as plt
import numpy as np
from sklearn.model_selection import train_test_split
from sklearn.datasets import load_breast_cancer
from sklearn.linear_model import LogisticRegression
cancer = load_breast_cancer()
import pandas as pd
# Making a data frame
cancerpd = pd.DataFrame(cancer.data, columns=cancer.feature_names)
fig, axes = plt.subplots(15,2,figsize=(10,20))
malignant = cancer.data[cancer.target == 0]
benign = cancer.data[cancer.target == 1]
ax = axes.ravel()
for i in range(30):
_, bins = np.histogram(cancer.data[:,i], bins =50)
ax[i].hist(malignant[:,i], bins = bins, alpha = 0.5)
ax[i].hist(benign[:,i], bins = bins, alpha = 0.5)
ax[i].set_title(cancer.feature_names[i])
ax[i].set_yticks(())
ax[0].set_xlabel("Feature magnitude")
ax[0].set_ylabel("Frequency")
ax[0].legend(["Malignant", "Benign"], loc ="best")
fig.tight_layout()
plt.show()
import seaborn as sns
correlation_matrix = cancerpd.corr().round(1)
# use the heatmap function from seaborn to plot the correlation matrix
# annot = True to print the values inside the square
plt.figure(figsize=(15,8))
sns.heatmap(data=correlation_matrix, annot=True)
plt.show()
Discussing the correlation data
In the above example we note two things. In the first plot we display the overlap of benign and malignant tumors as functions of the various features in the Wisconsing breast cancer data set. We see that for some of the features we can distinguish clearly the benign and malignant cases while for other features we cannot. This can point to us which features may be of greater interest when we wish to classify a benign or not benign tumour.
In the second figure we have computed the so-called correlation matrix, which in our case with thirty features becomes a \( 30\times 30 \) matrix.
We constructed this matrix using pandas via the statements
cancerpd = pd.DataFrame(cancer.data, columns=cancer.feature_names)
and then
correlation_matrix = cancerpd.corr().round(1)
Diagonalizing this matrix we can in turn say something about which features are of relevance and which are not. This leads us to the classical Principal Component Analysis (PCA) theorem with applications. This will be discussed later this semester (week 43).
Other measures in classification studies: Cancer Data again
import matplotlib.pyplot as plt
import numpy as np
from sklearn.model_selection import train_test_split
from sklearn.datasets import load_breast_cancer
from sklearn.linear_model import LogisticRegression
# Load the data
cancer = load_breast_cancer()
X_train, X_test, y_train, y_test = train_test_split(cancer.data,cancer.target,random_state=0)
print(X_train.shape)
print(X_test.shape)
# Logistic Regression
logreg = LogisticRegression(solver='lbfgs')
logreg.fit(X_train, y_train)
from sklearn.preprocessing import LabelEncoder
from sklearn.model_selection import cross_validate
#Cross validation
accuracy = cross_validate(logreg,X_test,y_test,cv=10)['test_score']
print(accuracy)
print("Test set accuracy with Logistic Regression: {:.2f}".format(logreg.score(X_test,y_test)))
import scikitplot as skplt
y_pred = logreg.predict(X_test)
skplt.metrics.plot_confusion_matrix(y_test, y_pred, normalize=True)
plt.show()
y_probas = logreg.predict_proba(X_test)
skplt.metrics.plot_roc(y_test, y_probas)
plt.show()
skplt.metrics.plot_cumulative_gain(y_test, y_probas)
plt.show()
Optimization, the central part of any Machine Learning algortithm
Almost every problem in machine learning and data science starts with a dataset \( X \), a model \( g(\beta) \), which is a function of the parameters \( \beta \) and a cost function \( C(X, g(\beta)) \) that allows us to judge how well the model \( g(\beta) \) explains the observations \( X \). The model is fit by finding the values of \( \beta \) that minimize the cost function. Ideally we would be able to solve for \( \beta \) analytically, however this is not possible in general and we must use some approximative/numerical method to compute the minimum.
Revisiting our Logistic Regression case
In our discussion on Logistic Regression we studied the case of two classes, with \( y_i \) either \( 0 \) or \( 1 \). Furthermore we assumed also that we have only two parameters \( \beta \) in our fitting, that is we defined probabilities
$$ \begin{align*} p(y_i=1|x_i,\boldsymbol{\beta}) &= \frac{\exp{(\beta_0+\beta_1x_i)}}{1+\exp{(\beta_0+\beta_1x_i)}},\nonumber\\ p(y_i=0|x_i,\boldsymbol{\beta}) &= 1 - p(y_i=1|x_i,\boldsymbol{\beta}), \end{align*} $$where \( \boldsymbol{\beta} \) are the weights we wish to extract from data, in our case \( \beta_0 \) and \( \beta_1 \).
The equations to solve
Our compact equations used a definition of a vector \( \boldsymbol{y} \) with \( n \) elements \( y_i \), an \( n\times p \) matrix \( \boldsymbol{X} \) which contains the \( x_i \) values and a vector \( \boldsymbol{p} \) of fitted probabilities \( p(y_i\vert x_i,\boldsymbol{\beta}) \). We rewrote in a more compact form the first derivative of the cost function as
$$ \frac{\partial \mathcal{C}(\boldsymbol{\beta})}{\partial \boldsymbol{\beta}} = -\boldsymbol{X}^T\left(\boldsymbol{y}-\boldsymbol{p}\right). $$If we in addition define a diagonal matrix \( \boldsymbol{W} \) with elements \( p(y_i\vert x_i,\boldsymbol{\beta})(1-p(y_i\vert x_i,\boldsymbol{\beta}) \), we can obtain a compact expression of the second derivative as
$$ \frac{\partial^2 \mathcal{C}(\boldsymbol{\beta})}{\partial \boldsymbol{\beta}\partial \boldsymbol{\beta}^T} = \boldsymbol{X}^T\boldsymbol{W}\boldsymbol{X}. $$This defines what is called the Hessian matrix.
Solving using Newton-Raphson's method
If we can set up these equations, Newton-Raphson's iterative method is normally the method of choice. It requires however that we can compute in an efficient way the matrices that define the first and second derivatives.
Our iterative scheme is then given by
$$ \boldsymbol{\beta}^{\mathrm{new}} = \boldsymbol{\beta}^{\mathrm{old}}-\left(\frac{\partial^2 \mathcal{C}(\boldsymbol{\beta})}{\partial \boldsymbol{\beta}\partial \boldsymbol{\beta}^T}\right)^{-1}_{\boldsymbol{\beta}^{\mathrm{old}}}\times \left(\frac{\partial \mathcal{C}(\boldsymbol{\beta})}{\partial \boldsymbol{\beta}}\right)_{\boldsymbol{\beta}^{\mathrm{old}}}, $$or in matrix form as
$$ \boldsymbol{\beta}^{\mathrm{new}} = \boldsymbol{\beta}^{\mathrm{old}}-\left(\boldsymbol{X}^T\boldsymbol{W}\boldsymbol{X} \right)^{-1}\times \left(-\boldsymbol{X}^T(\boldsymbol{y}-\boldsymbol{p}) \right)_{\boldsymbol{\beta}^{\mathrm{old}}}. $$The right-hand side is computed with the old values of \( \beta \).
If we can compute these matrices, in particular the Hessian, the above is often the easiest method to implement.
Brief reminder on Newton-Raphson's method
Let us quickly remind ourselves how we derive the above method.
Perhaps the most celebrated of all one-dimensional root-finding routines is Newton's method, also called the Newton-Raphson method. This method requires the evaluation of both the function \( f \) and its derivative \( f' \) at arbitrary points. If you can only calculate the derivative numerically and/or your function is not of the smooth type, we normally discourage the use of this method.
The equations
The Newton-Raphson formula consists geometrically of extending the tangent line at a current point until it crosses zero, then setting the next guess to the abscissa of that zero-crossing. The mathematics behind this method is rather simple. Employing a Taylor expansion for \( x \) sufficiently close to the solution \( s \), we have
$$ f(s)=0=f(x)+(s-x)f'(x)+\frac{(s-x)^2}{2}f''(x) +\dots. \label{eq:taylornr} $$For small enough values of the function and for well-behaved functions, the terms beyond linear are unimportant, hence we obtain
$$ f(x)+(s-x)f'(x)\approx 0, $$yielding
$$ s\approx x-\frac{f(x)}{f'(x)}. $$Having in mind an iterative procedure, it is natural to start iterating with
$$ x_{n+1}=x_n-\frac{f(x_n)}{f'(x_n)}. $$Simple geometric interpretation
The above is Newton-Raphson's method. It has a simple geometric interpretation, namely \( x_{n+1} \) is the point where the tangent from \( (x_n,f(x_n)) \) crosses the \( x \)-axis. Close to the solution, Newton-Raphson converges fast to the desired result. However, if we are far from a root, where the higher-order terms in the series are important, the Newton-Raphson formula can give grossly inaccurate results. For instance, the initial guess for the root might be so far from the true root as to let the search interval include a local maximum or minimum of the function. If an iteration places a trial guess near such a local extremum, so that the first derivative nearly vanishes, then Newton-Raphson may fail totally
Extending to more than one variable
Newton's method can be generalized to systems of several non-linear equations and variables. Consider the case with two equations
$$ \begin{array}{cc} f_1(x_1,x_2) &=0\\ f_2(x_1,x_2) &=0,\end{array} $$which we Taylor expand to obtain
$$ \begin{array}{cc} 0=f_1(x_1+h_1,x_2+h_2)=&f_1(x_1,x_2)+h_1 \partial f_1/\partial x_1+h_2 \partial f_1/\partial x_2+\dots\\ 0=f_2(x_1+h_1,x_2+h_2)=&f_2(x_1,x_2)+h_1 \partial f_2/\partial x_1+h_2 \partial f_2/\partial x_2+\dots \end{array}. $$Defining the Jacobian matrix \( {\bf \boldsymbol{J}} \) we have
$$ {\bf \boldsymbol{J}}=\left( \begin{array}{cc} \partial f_1/\partial x_1 & \partial f_1/\partial x_2 \\ \partial f_2/\partial x_1 &\partial f_2/\partial x_2 \end{array} \right), $$we can rephrase Newton's method as
$$ \left(\begin{array}{c} x_1^{n+1} \\ x_2^{n+1} \end{array} \right)= \left(\begin{array}{c} x_1^{n} \\ x_2^{n} \end{array} \right)+ \left(\begin{array}{c} h_1^{n} \\ h_2^{n} \end{array} \right), $$where we have defined
$$ \left(\begin{array}{c} h_1^{n} \\ h_2^{n} \end{array} \right)= -{\bf \boldsymbol{J}}^{-1} \left(\begin{array}{c} f_1(x_1^{n},x_2^{n}) \\ f_2(x_1^{n},x_2^{n}) \end{array} \right). $$We need thus to compute the inverse of the Jacobian matrix and it is to understand that difficulties may arise in case \( {\bf \boldsymbol{J}} \) is nearly singular.
It is rather straightforward to extend the above scheme to systems of more than two non-linear equations. In our case, the Jacobian matrix is given by the Hessian that represents the second derivative of cost function.
Steepest descent
The basic idea of gradient descent is that a function \( F(\mathbf{x}) \), \( \mathbf{x} \equiv (x_1,\cdots,x_n) \), decreases fastest if one goes from \( \bf {x} \) in the direction of the negative gradient \( -\nabla F(\mathbf{x}) \).
It can be shown that if
$$ \mathbf{x}_{k+1} = \mathbf{x}_k - \gamma_k \nabla F(\mathbf{x}_k), $$with \( \gamma_k > 0 \).
For \( \gamma_k \) small enough, then \( F(\mathbf{x}_{k+1}) \leq F(\mathbf{x}_k) \). This means that for a sufficiently small \( \gamma_k \) we are always moving towards smaller function values, i.e a minimum.
More on Steepest descent
The previous observation is the basis of the method of steepest descent, which is also referred to as just gradient descent (GD). One starts with an initial guess \( \mathbf{x}_0 \) for a minimum of \( F \) and computes new approximations according to
$$ \mathbf{x}_{k+1} = \mathbf{x}_k - \gamma_k \nabla F(\mathbf{x}_k), \ \ k \geq 0. $$The parameter \( \gamma_k \) is often referred to as the step length or the learning rate within the context of Machine Learning.
The ideal
Ideally the sequence \( \{\mathbf{x}_k \}_{k=0} \) converges to a global minimum of the function \( F \). In general we do not know if we are in a global or local minimum. In the special case when \( F \) is a convex function, all local minima are also global minima, so in this case gradient descent can converge to the global solution. The advantage of this scheme is that it is conceptually simple and straightforward to implement. However the method in this form has some severe limitations:
In machine learing we are often faced with non-convex high dimensional cost functions with many local minima. Since GD is deterministic we will get stuck in a local minimum, if the method converges, unless we have a very good intial guess. This also implies that the scheme is sensitive to the chosen initial condition.
Note that the gradient is a function of \( \mathbf{x} = (x_1,\cdots,x_n) \) which makes it expensive to compute numerically.
The sensitiveness of the gradient descent
The gradient descent method is sensitive to the choice of learning rate \( \gamma_k \). This is due to the fact that we are only guaranteed that \( F(\mathbf{x}_{k+1}) \leq F(\mathbf{x}_k) \) for sufficiently small \( \gamma_k \). The problem is to determine an optimal learning rate. If the learning rate is chosen too small the method will take a long time to converge and if it is too large we can experience erratic behavior.
Many of these shortcomings can be alleviated by introducing randomness. One such method is that of Stochastic Gradient Descent (SGD), see below.
Convex functions
Ideally we want our cost/loss function to be convex(concave).
First we give the definition of a convex set: A set \( C \) in \( \mathbb{R}^n \) is said to be convex if, for all \( x \) and \( y \) in \( C \) and all \( t \in (0,1) \) , the point \( (1 − t)x + ty \) also belongs to C. Geometrically this means that every point on the line segment connecting \( x \) and \( y \) is in \( C \) as discussed below.
The convex subsets of \( \mathbb{R} \) are the intervals of \( \mathbb{R} \). Examples of convex sets of \( \mathbb{R}^2 \) are the regular polygons (triangles, rectangles, pentagons, etc...).
Convex function
Convex function: Let \( X \subset \mathbb{R}^n \) be a convex set. Assume that the function \( f: X \rightarrow \mathbb{R} \) is continuous, then \( f \) is said to be convex if \( f(tx_1 + (1-t)x_2) \leq tf(x_1) + (1-t)f(x_2) \) for all \( x_1, x_2 \in X \) and for all \( t \in [0,1] \). If \( \leq \) is replaced with a strict inequaltiy in the definition, we demand \( x_1 \neq x_2 \) and \( t\in(0,1) \) then \( f \) is said to be strictly convex. For a single variable function, convexity means that if you draw a straight line connecting \( f(x_1) \) and \( f(x_2) \), the value of the function on the interval \( [x_1,x_2] \) is always below the line as illustrated below.
Conditions on convex functions
In the following we state first and second-order conditions which ensures convexity of a function \( f \). We write \( D_f \) to denote the domain of \( f \), i.e the subset of \( R^n \) where \( f \) is defined. For more details and proofs we refer to: S. Boyd and L. Vandenberghe. Convex Optimization. Cambridge University Press.
Suppose \( f \) is differentiable (i.e \( \nabla f(x) \) is well defined for all \( x \) in the domain of \( f \)). Then \( f \) is convex if and only if \( D_f \) is a convex set and \( f(y) \geq f(x) + \nabla f(x)^T (y-x) \) holds for all \( x,y \in D_f \).
This condition means that for a convex function the first order Taylor expansion (right hand side above) at any point a global under estimator of the function. To convince yourself you can make a drawing of \( f(x) = x^2+1 \) and draw the tangent line to \( f(x) \) and note that it is always below the graph.
Assume that \( f \) is twice differentiable, i.e the Hessian matrix exists at each point in \( D_f \). Then \( f \) is convex if and only if \( D_f \) is a convex set and its Hessian is positive semi-definite for all \( x\in D_f \). For a single-variable function this reduces to \( f''(x) \geq 0 \). Geometrically this means that \( f \) has nonnegative curvature everywhere.
This condition is particularly useful since it gives us an procedure for determining if the function under consideration is convex, apart from using the definition.
More on convex functions
The next result is of great importance to us and the reason why we are going on about convex functions. In machine learning we frequently have to minimize a loss/cost function in order to find the best parameters for the model we are considering.
Ideally we want the global minimum (for high-dimensional models it is hard to know if we have local or global minimum). However, if the cost/loss function is convex the following result provides invaluable information:
Consider the problem of finding \( x \in \mathbb{R}^n \) such that \( f(x) \) is minimal, where \( f \) is convex and differentiable. Then, any point \( x^* \) that satisfies \( \nabla f(x^*) = 0 \) is a global minimum.
This result means that if we know that the cost/loss function is convex and we are able to find a minimum, we are guaranteed that it is a global minimum.
Some simple problems
- Show that \( f(x)=x^2 \) is convex for \( x \in \mathbb{R} \) using the definition of convexity. Hint: If you re-write the definition, \( f \) is convex if the following holds for all \( x,y \in D_f \) and any \( \lambda \in [0,1] \) $\lambda f(x)+(1-\lambda)f(y)-f(\lambda x + (1-\lambda) y ) \geq 0$.
- Using the second order condition show that the following functions are convex on the specified domain.
- \( f(x) = e^x \) is convex for \( x \in \mathbb{R} \).
- \( g(x) = -\ln(x) \) is convex for \( x \in (0,\infty) \).
- Let \( f(x) = x^2 \) and \( g(x) = e^x \). Show that \( f(g(x)) \) and \( g(f(x)) \) is convex for \( x \in \mathbb{R} \). Also show that if \( f(x) \) is any convex function than \( h(x) = e^{f(x)} \) is convex.
- A norm is any function that satisfy the following properties
- \( f(\alpha x) = |\alpha| f(x) \) for all \( \alpha \in \mathbb{R} \).
- \( f(x+y) \leq f(x) + f(y) \)
- \( f(x) \leq 0 \) for all \( x \in \mathbb{R}^n \) with equality if and only if \( x = 0 \)
Using the definition of convexity, try to show that a function satisfying the properties above is convex (the third condition is not needed to show this).
Standard steepest descent
Before we proceed, we would like to discuss the approach called the standard Steepest descent (different from the above steepest descent discussion), which again leads to us having to be able to compute a matrix. It belongs to the class of Conjugate Gradient methods (CG).
The success of the CG methodfor finding solutions of non-linear problems is based on the theory of conjugate gradients for linear systems of equations. It belongs to the class of iterative methods for solving problems from linear algebra of the type
$$ \begin{equation*} \boldsymbol{A}\boldsymbol{x} = \boldsymbol{b}. \end{equation*} $$In the iterative process we end up with a problem like
$$ \begin{equation*} \boldsymbol{r}= \boldsymbol{b}-\boldsymbol{A}\boldsymbol{x}, \end{equation*} $$where \( \boldsymbol{r} \) is the so-called residual or error in the iterative process.
When we have found the exact solution, \( \boldsymbol{r}=0 \).
Gradient method
The residual is zero when we reach the minimum of the quadratic equation
$$ \begin{equation*} P(\boldsymbol{x})=\frac{1}{2}\boldsymbol{x}^T\boldsymbol{A}\boldsymbol{x} - \boldsymbol{x}^T\boldsymbol{b}, \end{equation*} $$with the constraint that the matrix \( \boldsymbol{A} \) is positive definite and symmetric. This defines also the Hessian and we want it to be positive definite.
Steepest descent method
We denote the initial guess for \( \boldsymbol{x} \) as \( \boldsymbol{x}_0 \). We can assume without loss of generality that
$$ \begin{equation*} \boldsymbol{x}_0=0, \end{equation*} $$or consider the system
$$ \begin{equation*} \boldsymbol{A}\boldsymbol{z} = \boldsymbol{b}-\boldsymbol{A}\boldsymbol{x}_0, \end{equation*} $$instead.
Steepest descent method
One can show that the solution \( \boldsymbol{x} \) is also the unique minimizer of the quadratic form
$$ \begin{equation*} f(\boldsymbol{x}) = \frac{1}{2}\boldsymbol{x}^T\boldsymbol{A}\boldsymbol{x} - \boldsymbol{x}^T \boldsymbol{x} , \quad \boldsymbol{x}\in\mathbf{R}^n. \end{equation*} $$This suggests taking the first basis vector \( \boldsymbol{r}_1 \) (see below for definition) to be the gradient of \( f \) at \( \boldsymbol{x}=\boldsymbol{x}_0 \), which equals
$$ \begin{equation*} \boldsymbol{A}\boldsymbol{x}_0-\boldsymbol{b}, \end{equation*} $$and \( \boldsymbol{x}_0=0 \) it is equal \( -\boldsymbol{b} \).
Final expressions
We can compute the residual iteratively as
$$ \begin{equation*} \boldsymbol{r}_{k+1}=\boldsymbol{b}-\boldsymbol{A}\boldsymbol{x}_{k+1}, \end{equation*} $$which equals
$$ \begin{equation*} \boldsymbol{b}-\boldsymbol{A}(\boldsymbol{x}_k+\alpha_k\boldsymbol{r}_k), \end{equation*} $$or
$$ \begin{equation*} (\boldsymbol{b}-\boldsymbol{A}\boldsymbol{x}_k)-\alpha_k\boldsymbol{A}\boldsymbol{r}_k, \end{equation*} $$which gives
$$ \alpha_k = \frac{\boldsymbol{r}_k^T\boldsymbol{r}_k}{\boldsymbol{r}_k^T\boldsymbol{A}\boldsymbol{r}_k} $$leading to the iterative scheme
$$ \begin{equation*} \boldsymbol{x}_{k+1}=\boldsymbol{x}_k+\alpha_k\boldsymbol{r}_{k}, \end{equation*} $$Steepest descent example
import numpy as np
import numpy.linalg as la
import scipy.optimize as sopt
import matplotlib.pyplot as pt
from mpl_toolkits.mplot3d import axes3d
def f(x):
return x[0]**2 + 3.0*x[1]**2
def df(x):
return np.array([2*x[0], 6*x[1]])
fig = pt.figure()
ax = fig.gca(projection="3d")
xmesh, ymesh = np.mgrid[-3:3:50j,-3:3:50j]
fmesh = f(np.array([xmesh, ymesh]))
ax.plot_surface(xmesh, ymesh, fmesh)
And then as countor plot
pt.axis("equal")
pt.contour(xmesh, ymesh, fmesh)
guesses = [np.array([2, 2./5])]
Find guesses
x = guesses[-1]
s = -df(x)
Run it!
def f1d(alpha):
return f(x + alpha*s)
alpha_opt = sopt.golden(f1d)
next_guess = x + alpha_opt * s
guesses.append(next_guess)
print(next_guess)
What happened?
pt.axis("equal")
pt.contour(xmesh, ymesh, fmesh, 50)
it_array = np.array(guesses)
pt.plot(it_array.T[0], it_array.T[1], "x-")
Note that we did only one iteration here. We can easily add more using our previous guesses.
Conjugate gradient method
In the CG method we define so-called conjugate directions and two vectors \( \boldsymbol{s} \) and \( \boldsymbol{t} \) are said to be conjugate if
$$ \begin{equation*} \boldsymbol{s}^T\boldsymbol{A}\boldsymbol{t}= 0. \end{equation*} $$The philosophy of the CG method is to perform searches in various conjugate directions of our vectors \( \boldsymbol{x}_i \) obeying the above criterion, namely
$$ \begin{equation*} \boldsymbol{x}_i^T\boldsymbol{A}\boldsymbol{x}_j= 0. \end{equation*} $$Two vectors are conjugate if they are orthogonal with respect to this inner product. Being conjugate is a symmetric relation: if \( \boldsymbol{s} \) is conjugate to \( \boldsymbol{t} \), then \( \boldsymbol{t} \) is conjugate to \( \boldsymbol{s} \).
Conjugate gradient method
An example is given by the eigenvectors of the matrix
$$ \begin{equation*} \boldsymbol{v}_i^T\boldsymbol{A}\boldsymbol{v}_j= \lambda\boldsymbol{v}_i^T\boldsymbol{v}_j, \end{equation*} $$which is zero unless \( i=j \).
Conjugate gradient method
Assume now that we have a symmetric positive-definite matrix \( \boldsymbol{A} \) of size \( n\times n \). At each iteration \( i+1 \) we obtain the conjugate direction of a vector
$$ \begin{equation*} \boldsymbol{x}_{i+1}=\boldsymbol{x}_{i}+\alpha_i\boldsymbol{p}_{i}. \end{equation*} $$We assume that \( \boldsymbol{p}_{i} \) is a sequence of \( n \) mutually conjugate directions. Then the \( \boldsymbol{p}_{i} \) form a basis of \( R^n \) and we can expand the solution $ \boldsymbol{A}\boldsymbol{x} = \boldsymbol{b}$ in this basis, namely
$$ \begin{equation*} \boldsymbol{x} = \sum^{n}_{i=1} \alpha_i \boldsymbol{p}_i. \end{equation*} $$Conjugate gradient method
The coefficients are given by
$$ \begin{equation*} \mathbf{A}\mathbf{x} = \sum^{n}_{i=1} \alpha_i \mathbf{A} \mathbf{p}_i = \mathbf{b}. \end{equation*} $$Multiplying with \( \boldsymbol{p}_k^T \) from the left gives
$$ \begin{equation*} \boldsymbol{p}_k^T \boldsymbol{A}\boldsymbol{x} = \sum^{n}_{i=1} \alpha_i\boldsymbol{p}_k^T \boldsymbol{A}\boldsymbol{p}_i= \boldsymbol{p}_k^T \boldsymbol{b}, \end{equation*} $$and we can define the coefficients \( \alpha_k \) as
$$ \begin{equation*} \alpha_k = \frac{\boldsymbol{p}_k^T \boldsymbol{b}}{\boldsymbol{p}_k^T \boldsymbol{A} \boldsymbol{p}_k} \end{equation*} $$Conjugate gradient method and iterations
If we choose the conjugate vectors \( \boldsymbol{p}_k \) carefully, then we may not need all of them to obtain a good approximation to the solution \( \boldsymbol{x} \). We want to regard the conjugate gradient method as an iterative method. This will us to solve systems where \( n \) is so large that the direct method would take too much time.
We denote the initial guess for \( \boldsymbol{x} \) as \( \boldsymbol{x}_0 \). We can assume without loss of generality that
$$ \begin{equation*} \boldsymbol{x}_0=0, \end{equation*} $$or consider the system
$$ \begin{equation*} \boldsymbol{A}\boldsymbol{z} = \boldsymbol{b}-\boldsymbol{A}\boldsymbol{x}_0, \end{equation*} $$instead.
Conjugate gradient method
One can show that the solution \( \boldsymbol{x} \) is also the unique minimizer of the quadratic form
$$ \begin{equation*} f(\boldsymbol{x}) = \frac{1}{2}\boldsymbol{x}^T\boldsymbol{A}\boldsymbol{x} - \boldsymbol{x}^T \boldsymbol{x} , \quad \boldsymbol{x}\in\mathbf{R}^n. \end{equation*} $$This suggests taking the first basis vector \( \boldsymbol{p}_1 \) to be the gradient of \( f \) at \( \boldsymbol{x}=\boldsymbol{x}_0 \), which equals
$$ \begin{equation*} \boldsymbol{A}\boldsymbol{x}_0-\boldsymbol{b}, \end{equation*} $$and \( \boldsymbol{x}_0=0 \) it is equal \( -\boldsymbol{b} \). The other vectors in the basis will be conjugate to the gradient, hence the name conjugate gradient method.
Conjugate gradient method
Let \( \boldsymbol{r}_k \) be the residual at the \( k \)-th step:
$$ \begin{equation*} \boldsymbol{r}_k=\boldsymbol{b}-\boldsymbol{A}\boldsymbol{x}_k. \end{equation*} $$Note that \( \boldsymbol{r}_k \) is the negative gradient of \( f \) at \( \boldsymbol{x}=\boldsymbol{x}_k \), so the gradient descent method would be to move in the direction \( \boldsymbol{r}_k \). Here, we insist that the directions \( \boldsymbol{p}_k \) are conjugate to each other, so we take the direction closest to the gradient \( \boldsymbol{r}_k \) under the conjugacy constraint. This gives the following expression
$$ \begin{equation*} \boldsymbol{p}_{k+1}=\boldsymbol{r}_k-\frac{\boldsymbol{p}_k^T \boldsymbol{A}\boldsymbol{r}_k}{\boldsymbol{p}_k^T\boldsymbol{A}\boldsymbol{p}_k} \boldsymbol{p}_k. \end{equation*} $$Conjugate gradient method
We can also compute the residual iteratively as
$$ \begin{equation*} \boldsymbol{r}_{k+1}=\boldsymbol{b}-\boldsymbol{A}\boldsymbol{x}_{k+1}, \end{equation*} $$which equals
$$ \begin{equation*} \boldsymbol{b}-\boldsymbol{A}(\boldsymbol{x}_k+\alpha_k\boldsymbol{p}_k), \end{equation*} $$or
$$ \begin{equation*} (\boldsymbol{b}-\boldsymbol{A}\boldsymbol{x}_k)-\alpha_k\boldsymbol{A}\boldsymbol{p}_k, \end{equation*} $$which gives
$$ \begin{equation*} \boldsymbol{r}_{k+1}=\boldsymbol{r}_k-\boldsymbol{A}\boldsymbol{p}_{k}, \end{equation*} $$Revisiting our first homework
We will use linear regression as a case study for the gradient descent methods. Linear regression is a great test case for the gradient descent methods discussed in the lectures since it has several desirable properties such as:
- An analytical solution (recall homework set 1).
- The gradient can be computed analytically.
- The cost function is convex which guarantees that gradient descent converges for small enough learning rates
We revisit an example similar to what we had in the first homework set. We had a function of the type
x = 2*np.random.rand(m,1)
y = 4+3*x+np.random.randn(m,1)
with \( x_i \in [0,1] \) is chosen randomly using a uniform distribution. Additionally we have a stochastic noise chosen according to a normal distribution \( \cal {N}(0,1) \). The linear regression model is given by
$$ h_\beta(x) = \boldsymbol{y} = \beta_0 + \beta_1 x, $$such that
$$ \boldsymbol{y}_i = \beta_0 + \beta_1 x_i. $$Gradient descent example
Let \( \mathbf{y} = (y_1,\cdots,y_n)^T \), \( \mathbf{\boldsymbol{y}} = (\boldsymbol{y}_1,\cdots,\boldsymbol{y}_n)^T \) and \( \beta = (\beta_0, \beta_1)^T \)
It is convenient to write \( \mathbf{\boldsymbol{y}} = X\beta \) where \( X \in \mathbb{R}^{100 \times 2} \) is the design matrix given by (we keep the intercept here)
$$ X \equiv \begin{bmatrix} 1 & x_1 \\ \vdots & \vdots \\ 1 & x_{100} & \\ \end{bmatrix}. $$The cost/loss/risk function is given by (
$$ C(\beta) = \frac{1}{n}||X\beta-\mathbf{y}||_{2}^{2} = \frac{1}{n}\sum_{i=1}^{100}\left[ (\beta_0 + \beta_1 x_i)^2 - 2 y_i (\beta_0 + \beta_1 x_i) + y_i^2\right] $$and we want to find \( \beta \) such that \( C(\beta) \) is minimized.
The derivative of the cost/loss function
Computing \( \partial C(\beta) / \partial \beta_0 \) and \( \partial C(\beta) / \partial \beta_1 \) we can show that the gradient can be written as
$$ \nabla_{\beta} C(\beta) = \frac{2}{n}\begin{bmatrix} \sum_{i=1}^{100} \left(\beta_0+\beta_1x_i-y_i\right) \\ \sum_{i=1}^{100}\left( x_i (\beta_0+\beta_1x_i)-y_ix_i\right) \\ \end{bmatrix} = \frac{2}{n}X^T(X\beta - \mathbf{y}), $$where \( X \) is the design matrix defined above.
The Hessian matrix
The Hessian matrix of \( C(\beta) \) is given by
$$ \boldsymbol{H} \equiv \begin{bmatrix} \frac{\partial^2 C(\beta)}{\partial \beta_0^2} & \frac{\partial^2 C(\beta)}{\partial \beta_0 \partial \beta_1} \\ \frac{\partial^2 C(\beta)}{\partial \beta_0 \partial \beta_1} & \frac{\partial^2 C(\beta)}{\partial \beta_1^2} & \\ \end{bmatrix} = \frac{2}{n}X^T X. $$This result implies that \( C(\beta) \) is a convex function since the matrix \( X^T X \) always is positive semi-definite.
Simple program
We can now write a program that minimizes \( C(\beta) \) using the gradient descent method with a constant learning rate \( \gamma \) according to
$$ \beta_{k+1} = \beta_k - \gamma \nabla_\beta C(\beta_k), \ k=0,1,\cdots $$We can use the expression we computed for the gradient and let use a \( \beta_0 \) be chosen randomly and let \( \gamma = 0.001 \). Stop iterating when \( ||\nabla_\beta C(\beta_k) || \leq \epsilon = 10^{-8} \). Note that the code below does not include the latter stop criterion.
And finally we can compare our solution for \( \beta \) with the analytic result given by \( \beta= (X^TX)^{-1} X^T \mathbf{y} \).
Gradient Descent Example
Here our simple example
# Importing various packages
from random import random, seed
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
from matplotlib.ticker import LinearLocator, FormatStrFormatter
import sys
# the number of datapoints
n = 100
x = 2*np.random.rand(n,1)
y = 4+3*x+np.random.randn(n,1)
X = np.c_[np.ones((n,1)), x]
# Hessian matrix
H = (2.0/n)* X.T @ X
# Get the eigenvalues
EigValues, EigVectors = np.linalg.eig(H)
print(f"Eigenvalues of Hessian Matrix:{EigValues}")
beta_linreg = np.linalg.inv(X.T @ X) @ X.T @ y
print(beta_linreg)
beta = np.random.randn(2,1)
eta = 1.0/np.max(EigValues)
Niterations = 1000
for iter in range(Niterations):
gradient = (2.0/n)*X.T @ (X @ beta-y)
beta -= eta*gradient
print(beta)
xnew = np.array([[0],[2]])
xbnew = np.c_[np.ones((2,1)), xnew]
ypredict = xbnew.dot(beta)
ypredict2 = xbnew.dot(beta_linreg)
plt.plot(xnew, ypredict, "r-")
plt.plot(xnew, ypredict2, "b-")
plt.plot(x, y ,'ro')
plt.axis([0,2.0,0, 15.0])
plt.xlabel(r'$x$')
plt.ylabel(r'$y$')
plt.title(r'Gradient descent example')
plt.show()
And a corresponding example using scikit-learn
# Importing various packages
from random import random, seed
import numpy as np
import matplotlib.pyplot as plt
from sklearn.linear_model import SGDRegressor
n = 100
x = 2*np.random.rand(n,1)
y = 4+3*x+np.random.randn(n,1)
X = np.c_[np.ones((n,1)), x]
beta_linreg = np.linalg.inv(X.T @ X) @ (X.T @ y)
print(beta_linreg)
sgdreg = SGDRegressor(max_iter = 50, penalty=None, eta0=0.1)
sgdreg.fit(x,y.ravel())
print(sgdreg.intercept_, sgdreg.coef_)
Gradient descent and Ridge
We have also discussed Ridge regression where the loss function contains a regularized term given by the \( L_2 \) norm of \( \beta \),
$$ C_{\text{ridge}}(\beta) = \frac{1}{n}||X\beta -\mathbf{y}||^2 + \lambda ||\beta||^2, \ \lambda \geq 0. $$In order to minimize \( C_{\text{ridge}}(\beta) \) using GD we adjust the gradient as follows
$$ \nabla_\beta C_{\text{ridge}}(\beta) = \frac{2}{n}\begin{bmatrix} \sum_{i=1}^{100} \left(\beta_0+\beta_1x_i-y_i\right) \\ \sum_{i=1}^{100}\left( x_i (\beta_0+\beta_1x_i)-y_ix_i\right) \\ \end{bmatrix} + 2\lambda\begin{bmatrix} \beta_0 \\ \beta_1\end{bmatrix} = 2 (\frac{1}{n}X^T(X\beta - \mathbf{y})+\lambda \beta). $$We can easily extend our program to minimize \( C_{\text{ridge}}(\beta) \) using gradient descent and compare with the analytical solution given by
$$ \beta_{\text{ridge}} = \left(X^T X + n\lambda I_{2 \times 2} \right)^{-1} X^T \mathbf{y}. $$The Hessian matrix for Ridge Regression
The Hessian matrix of Ridge Regression for our simple example is given by
$$ \boldsymbol{H} \equiv \begin{bmatrix} \frac{\partial^2 C(\beta)}{\partial \beta_0^2} & \frac{\partial^2 C(\beta)}{\partial \beta_0 \partial \beta_1} \\ \frac{\partial^2 C(\beta)}{\partial \beta_0 \partial \beta_1} & \frac{\partial^2 C(\beta)}{\partial \beta_1^2} & \\ \end{bmatrix} = \frac{2}{n}X^T X+2\lambda\boldsymbol{I}. $$This implies that the Hessian matrix is positive definite, hence the stationary point is a minimum. Note that the Ridge cost function is convex being a sum of two convex functions. Therefore, the stationary point is a global minimum of this function.
Program example for gradient descent with Ridge Regression
from random import random, seed
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
from matplotlib.ticker import LinearLocator, FormatStrFormatter
import sys
# the number of datapoints
n = 100
x = 2*np.random.rand(n,1)
y = 4+3*x+np.random.randn(n,1)
X = np.c_[np.ones((n,1)), x]
XT_X = X.T @ X
#Ridge parameter lambda
lmbda = 0.001
Id = n*lmbda* np.eye(XT_X.shape[0])
# Hessian matrix
H = (2.0/n)* XT_X+2*lmbda* np.eye(XT_X.shape[0])
# Get the eigenvalues
EigValues, EigVectors = np.linalg.eig(H)
print(f"Eigenvalues of Hessian Matrix:{EigValues}")
beta_linreg = np.linalg.inv(XT_X+Id) @ X.T @ y
print(beta_linreg)
# Start plain gradient descent
beta = np.random.randn(2,1)
eta = 1.0/np.max(EigValues)
Niterations = 100
for iter in range(Niterations):
gradients = 2.0/n*X.T @ (X @ (beta)-y)+2*lmbda*beta
beta -= eta*gradients
print(beta)
ypredict = X @ beta
ypredict2 = X @ beta_linreg
plt.plot(x, ypredict, "r-")
plt.plot(x, ypredict2, "b-")
plt.plot(x, y ,'ro')
plt.axis([0,2.0,0, 15.0])
plt.xlabel(r'$x$')
plt.ylabel(r'$y$')
plt.title(r'Gradient descent example for Ridge')
plt.show()
Using gradient descent methods, limitations
- Gradient descent (GD) finds local minima of our function. Since the GD algorithm is deterministic, if it converges, it will converge to a local minimum of our cost/loss/risk function. Because in ML we are often dealing with extremely rugged landscapes with many local minima, this can lead to poor performance.
- GD is sensitive to initial conditions. One consequence of the local nature of GD is that initial conditions matter. Depending on where one starts, one will end up at a different local minima. Therefore, it is very important to think about how one initializes the training process. This is true for GD as well as more complicated variants of GD.
- Gradients are computationally expensive to calculate for large datasets. In many cases in statistics and ML, the cost/loss/risk function is a sum of terms, with one term for each data point. For example, in linear regression, \( E \propto \sum_{i=1}^n (y_i - \mathbf{w}^T\cdot\mathbf{x}_i)^2 \); for logistic regression, the square error is replaced by the cross entropy. To calculate the gradient we have to sum over all \( n \) data points. Doing this at every GD step becomes extremely computationally expensive. An ingenious solution to this, is to calculate the gradients using small subsets of the data called "mini batches". This has the added benefit of introducing stochasticity into our algorithm.
- GD is very sensitive to choices of learning rates. GD is extremely sensitive to the choice of learning rates. If the learning rate is very small, the training process take an extremely long time. For larger learning rates, GD can diverge and give poor results. Furthermore, depending on what the local landscape looks like, we have to modify the learning rates to ensure convergence. Ideally, we would adaptively choose the learning rates to match the landscape.
- GD treats all directions in parameter space uniformly. Another major drawback of GD is that unlike Newton's method, the learning rate for GD is the same in all directions in parameter space. For this reason, the maximum learning rate is set by the behavior of the steepest direction and this can significantly slow down training. Ideally, we would like to take large steps in flat directions and small steps in steep directions. Since we are exploring rugged landscapes where curvatures change, this requires us to keep track of not only the gradient but second derivatives. The ideal scenario would be to calculate the Hessian but this proves to be too computationally expensive.
- GD can take exponential time to escape saddle points, even with random initialization. As we mentioned, GD is extremely sensitive to initial condition since it determines the particular local minimum GD would eventually reach. However, even with a good initialization scheme, through the introduction of randomness, GD can still take exponential time to escape saddle points.
Improving gradient descent with momentum
We discuss here some simple examples where we introduce what is called 'memory'about previous steps, or what is normally called momentum gradient descent. The mathematics is explained below in connection with Stochastic gradient descent.
from numpy import asarray
from numpy import arange
from numpy.random import rand
from numpy.random import seed
from matplotlib import pyplot
# objective function
def objective(x):
return x**2.0
# derivative of objective function
def derivative(x):
return x * 2.0
# gradient descent algorithm
def gradient_descent(objective, derivative, bounds, n_iter, step_size):
# track all solutions
solutions, scores = list(), list()
# generate an initial point
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# run the gradient descent
for i in range(n_iter):
# calculate gradient
gradient = derivative(solution)
# take a step
solution = solution - step_size * gradient
# evaluate candidate point
solution_eval = objective(solution)
# store solution
solutions.append(solution)
scores.append(solution_eval)
# report progress
print('>%d f(%s) = %.5f' % (i, solution, solution_eval))
return [solutions, scores]
# seed the pseudo random number generator
seed(4)
# define range for input
bounds = asarray([[-1.0, 1.0]])
# define the total iterations
n_iter = 30
# define the step size
step_size = 0.1
# perform the gradient descent search
solutions, scores = gradient_descent(objective, derivative, bounds, n_iter, step_size)
# sample input range uniformly at 0.1 increments
inputs = arange(bounds[0,0], bounds[0,1]+0.1, 0.1)
# compute targets
results = objective(inputs)
# create a line plot of input vs result
pyplot.plot(inputs, results)
# plot the solutions found
pyplot.plot(solutions, scores, '.-', color='red')
# show the plot
pyplot.show()
Same code but now with momentum gradient descent
from numpy import asarray
from numpy import arange
from numpy.random import rand
from numpy.random import seed
from matplotlib import pyplot
# objective function
def objective(x):
return x**2.0
# derivative of objective function
def derivative(x):
return x * 2.0
# gradient descent algorithm
def gradient_descent(objective, derivative, bounds, n_iter, step_size, momentum):
# track all solutions
solutions, scores = list(), list()
# generate an initial point
solution = bounds[:, 0] + rand(len(bounds)) * (bounds[:, 1] - bounds[:, 0])
# keep track of the change
change = 0.0
# run the gradient descent
for i in range(n_iter):
# calculate gradient
gradient = derivative(solution)
# calculate update
new_change = step_size * gradient + momentum * change
# take a step
solution = solution - new_change
# save the change
change = new_change
# evaluate candidate point
solution_eval = objective(solution)
# store solution
solutions.append(solution)
scores.append(solution_eval)
# report progress
print('>%d f(%s) = %.5f' % (i, solution, solution_eval))
return [solutions, scores]
# seed the pseudo random number generator
seed(4)
# define range for input
bounds = asarray([[-1.0, 1.0]])
# define the total iterations
n_iter = 30
# define the step size
step_size = 0.1
# define momentum
momentum = 0.3
# perform the gradient descent search with momentum
solutions, scores = gradient_descent(objective, derivative, bounds, n_iter, step_size, momentum)
# sample input range uniformly at 0.1 increments
inputs = arange(bounds[0,0], bounds[0,1]+0.1, 0.1)
# compute targets
results = objective(inputs)
# create a line plot of input vs result
pyplot.plot(inputs, results)
# plot the solutions found
pyplot.plot(solutions, scores, '.-', color='red')
# show the plot
pyplot.show()
Overview video on Stochastic Gradient Descent
What is Stochastic Gradient DescentBatches and mini-batches
In gradient descent we compute the cost function and its gradient for all data points we have.
In large-scale applications such as the ILSVRC challenge, the training data can have on order of millions of examples. Hence, it seems wasteful to compute the full cost function over the entire training set in order to perform only a single parameter update. A very common approach to addressing this challenge is to compute the gradient over batches of the training data. For example, a typical batch could contain some thousand examples from an entire training set of several millions. This batch is then used to perform a parameter update.
Stochastic Gradient Descent (SGD)
In stochastic gradient descent, the extreme case is the case where we have only one batch, that is we include the whole data set.
This process is called Stochastic Gradient Descent (SGD) (or also sometimes on-line gradient descent). This is relatively less common to see because in practice due to vectorized code optimizations it can be computationally much more efficient to evaluate the gradient for 100 examples, than the gradient for one example 100 times. Even though SGD technically refers to using a single example at a time to evaluate the gradient, you will hear people use the term SGD even when referring to mini-batch gradient descent (i.e. mentions of MGD for “Minibatch Gradient Descent”, or BGD for “Batch gradient descent” are rare to see), where it is usually assumed that mini-batches are used. The size of the mini-batch is a hyperparameter but it is not very common to cross-validate or bootstrap it. It is usually based on memory constraints (if any), or set to some value, e.g. 32, 64 or 128. We use powers of 2 in practice because many vectorized operation implementations work faster when their inputs are sized in powers of 2.
In our notes with SGD we mean stochastic gradient descent with mini-batches.
Stochastic Gradient Descent
Stochastic gradient descent (SGD) and variants thereof address some of the shortcomings of the Gradient descent method discussed above.
The underlying idea of SGD comes from the observation that the cost function, which we want to minimize, can almost always be written as a sum over \( n \) data points \( \{\mathbf{x}_i\}_{i=1}^n \),
$$ C(\mathbf{\beta}) = \sum_{i=1}^n c_i(\mathbf{x}_i, \mathbf{\beta}). $$Computation of gradients
This in turn means that the gradient can be computed as a sum over \( i \)-gradients
$$ \nabla_\beta C(\mathbf{\beta}) = \sum_i^n \nabla_\beta c_i(\mathbf{x}_i, \mathbf{\beta}). $$Stochasticity/randomness is introduced by only taking the gradient on a subset of the data called minibatches. If there are \( n \) data points and the size of each minibatch is \( M \), there will be \( n/M \) minibatches. We denote these minibatches by \( B_k \) where \( k=1,\cdots,n/M \).
SGD example
As an example, suppose we have \( 10 \) data points \( (\mathbf{x}_1,\cdots, \mathbf{x}_{10}) \) and we choose to have \( M=5 \) minibathces, then each minibatch contains two data points. In particular we have \( B_1 = (\mathbf{x}_1,\mathbf{x}_2), \cdots, B_5 = (\mathbf{x}_9,\mathbf{x}_{10}) \). Note that if you choose \( M=1 \) you have only a single batch with all data points and on the other extreme, you may choose \( M=n \) resulting in a minibatch for each datapoint, i.e \( B_k = \mathbf{x}_k \).
The idea is now to approximate the gradient by replacing the sum over all data points with a sum over the data points in one the minibatches picked at random in each gradient descent step
$$ \nabla_{\beta} C(\mathbf{\beta}) = \sum_{i=1}^n \nabla_\beta c_i(\mathbf{x}_i, \mathbf{\beta}) \rightarrow \sum_{i \in B_k}^n \nabla_\beta c_i(\mathbf{x}_i, \mathbf{\beta}). $$The gradient step
Thus a gradient descent step now looks like
$$ \beta_{j+1} = \beta_j - \gamma_j \sum_{i \in B_k}^n \nabla_\beta c_i(\mathbf{x}_i, \mathbf{\beta}) $$where \( k \) is picked at random with equal probability from \( [1,n/M] \). An iteration over the number of minibathces (n/M) is commonly referred to as an epoch. Thus it is typical to choose a number of epochs and for each epoch iterate over the number of minibatches, as exemplified in the code below.
Simple example code
import numpy as np
n = 100 #100 datapoints
M = 5 #size of each minibatch
m = int(n/M) #number of minibatches
n_epochs = 10 #number of epochs
j = 0
for epoch in range(1,n_epochs+1):
for i in range(m):
k = np.random.randint(m) #Pick the k-th minibatch at random
#Compute the gradient using the data in minibatch Bk
#Compute new suggestion for
j += 1
Taking the gradient only on a subset of the data has two important benefits. First, it introduces randomness which decreases the chance that our opmization scheme gets stuck in a local minima. Second, if the size of the minibatches are small relative to the number of datapoints (\( M < n \)), the computation of the gradient is much cheaper since we sum over the datapoints in the \( k-th \) minibatch and not all \( n \) datapoints.
When do we stop?
A natural question is when do we stop the search for a new minimum? One possibility is to compute the full gradient after a given number of epochs and check if the norm of the gradient is smaller than some threshold and stop if true. However, the condition that the gradient is zero is valid also for local minima, so this would only tell us that we are close to a local/global minimum. However, we could also evaluate the cost function at this point, store the result and continue the search. If the test kicks in at a later stage we can compare the values of the cost function and keep the \( \beta \) that gave the lowest value.
Slightly different approach
Another approach is to let the step length \( \gamma_j \) depend on the number of epochs in such a way that it becomes very small after a reasonable time such that we do not move at all. Such approaches are also called scaling. There are many such ways to scale the learning rate and discussions here. See also https://towardsdatascience.com/learning-rate-schedules-and-adaptive-learning-rate-methods-for-deep-learning-2c8f433990d1 for a discussion of different scaling functions for the learning rate.
Time decay rate
As an example, let \( e = 0,1,2,3,\cdots \) denote the current epoch and let \( t_0, t_1 > 0 \) be two fixed numbers. Furthermore, let \( t = e \cdot m + i \) where \( m \) is the number of minibatches and \( i=0,\cdots,m-1 \). Then the function $$\gamma_j(t; t_0, t_1) = \frac{t_0}{t+t_1} $$ goes to zero as the number of epochs gets large. I.e. we start with a step length \( \gamma_j (0; t_0, t_1) = t_0/t_1 \) which decays in time \( t \).
In this way we can fix the number of epochs, compute \( \beta \) and evaluate the cost function at the end. Repeating the computation will give a different result since the scheme is random by design. Then we pick the final \( \beta \) that gives the lowest value of the cost function.
import numpy as np
def step_length(t,t0,t1):
return t0/(t+t1)
n = 100 #100 datapoints
M = 5 #size of each minibatch
m = int(n/M) #number of minibatches
n_epochs = 500 #number of epochs
t0 = 1.0
t1 = 10
gamma_j = t0/t1
j = 0
for epoch in range(1,n_epochs+1):
for i in range(m):
k = np.random.randint(m) #Pick the k-th minibatch at random
#Compute the gradient using the data in minibatch Bk
#Compute new suggestion for beta
t = epoch*m+i
gamma_j = step_length(t,t0,t1)
j += 1
print("gamma_j after %d epochs: %g" % (n_epochs,gamma_j))
Code with a Number of Minibatches which varies
In the code here we vary the number of mini-batches.
# Importing various packages
from math import exp, sqrt
from random import random, seed
import numpy as np
import matplotlib.pyplot as plt
n = 100
x = 2*np.random.rand(n,1)
y = 4+3*x+np.random.randn(n,1)
X = np.c_[np.ones((n,1)), x]
XT_X = X.T @ X
theta_linreg = np.linalg.inv(X.T @ X) @ (X.T @ y)
print("Own inversion")
print(theta_linreg)
# Hessian matrix
H = (2.0/n)* XT_X
EigValues, EigVectors = np.linalg.eig(H)
print(f"Eigenvalues of Hessian Matrix:{EigValues}")
theta = np.random.randn(2,1)
eta = 1.0/np.max(EigValues)
Niterations = 1000
for iter in range(Niterations):
gradients = 2.0/n*X.T @ ((X @ theta)-y)
theta -= eta*gradients
print("theta from own gd")
print(theta)
xnew = np.array([[0],[2]])
Xnew = np.c_[np.ones((2,1)), xnew]
ypredict = Xnew.dot(theta)
ypredict2 = Xnew.dot(theta_linreg)
n_epochs = 50
M = 5 #size of each minibatch
m = int(n/M) #number of minibatches
t0, t1 = 5, 50
def learning_schedule(t):
return t0/(t+t1)
theta = np.random.randn(2,1)
for epoch in range(n_epochs):
# Can you figure out a better way of setting up the contributions to each batch?
for i in range(m):
random_index = M*np.random.randint(m)
xi = X[random_index:random_index+M]
yi = y[random_index:random_index+M]
gradients = (2.0/M)* xi.T @ ((xi @ theta)-yi)
eta = learning_schedule(epoch*m+i)
theta = theta - eta*gradients
print("theta from own sdg")
print(theta)
plt.plot(xnew, ypredict, "r-")
plt.plot(xnew, ypredict2, "b-")
plt.plot(x, y ,'ro')
plt.axis([0,2.0,0, 15.0])
plt.xlabel(r'$x$')
plt.ylabel(r'$y$')
plt.title(r'Random numbers ')
plt.show()
Replace or not
In the above code, we have use replacement in setting up the mini-batches. The discussion here may be useful.
Momentum based GD
The stochastic gradient descent (SGD) is almost always used with a momentum or inertia term that serves as a memory of the direction we are moving in parameter space. This is typically implemented as follows
$$ \begin{align} \mathbf{v}_{t}&=\gamma \mathbf{v}_{t-1}+\eta_{t}\nabla_\theta E(\boldsymbol{\theta}_t) \nonumber \\ \boldsymbol{\theta}_{t+1}&= \boldsymbol{\theta}_t -\mathbf{v}_{t}, \label{_auto2} \end{align} $$where we have introduced a momentum parameter \( \gamma \), with \( 0\le\gamma\le 1 \), and for brevity we dropped the explicit notation to indicate the gradient is to be taken over a different mini-batch at each step. We call this algorithm gradient descent with momentum (GDM). From these equations, it is clear that \( \mathbf{v}_t \) is a running average of recently encountered gradients and \( (1-\gamma)^{-1} \) sets the characteristic time scale for the memory used in the averaging procedure. Consistent with this, when \( \gamma=0 \), this just reduces down to ordinary SGD as discussed earlier. An equivalent way of writing the updates is
$$ \Delta \boldsymbol{\theta}_{t+1} = \gamma \Delta \boldsymbol{\theta}_t -\ \eta_{t}\nabla_\theta E(\boldsymbol{\theta}_t), $$where we have defined \( \Delta \boldsymbol{\theta}_{t}= \boldsymbol{\theta}_t-\boldsymbol{\theta}_{t-1} \).
More on momentum based approaches
Let us try to get more intuition from these equations. It is helpful to consider a simple physical analogy with a particle of mass \( m \) moving in a viscous medium with drag coefficient \( \mu \) and potential \( E(\mathbf{w}) \). If we denote the particle's position by \( \mathbf{w} \), then its motion is described by
$$ m {d^2 \mathbf{w} \over dt^2} + \mu {d \mathbf{w} \over dt }= -\nabla_w E(\mathbf{w}). $$We can discretize this equation in the usual way to get
$$ m { \mathbf{w}_{t+\Delta t}-2 \mathbf{w}_{t} +\mathbf{w}_{t-\Delta t} \over (\Delta t)^2}+\mu {\mathbf{w}_{t+\Delta t}- \mathbf{w}_{t} \over \Delta t} = -\nabla_w E(\mathbf{w}). $$Rearranging this equation, we can rewrite this as
$$ \Delta \mathbf{w}_{t +\Delta t}= - { (\Delta t)^2 \over m +\mu \Delta t} \nabla_w E(\mathbf{w})+ {m \over m +\mu \Delta t} \Delta \mathbf{w}_t. $$Momentum parameter
Notice that this equation is identical to previous one if we identify the position of the particle, \( \mathbf{w} \), with the parameters \( \boldsymbol{\theta} \). This allows us to identify the momentum parameter and learning rate with the mass of the particle and the viscous drag as:
$$ \gamma= {m \over m +\mu \Delta t }, \qquad \eta = {(\Delta t)^2 \over m +\mu \Delta t}. $$Thus, as the name suggests, the momentum parameter is proportional to the mass of the particle and effectively provides inertia. Furthermore, in the large viscosity/small learning rate limit, our memory time scales as \( (1-\gamma)^{-1} \approx m/(\mu \Delta t) \).
Why is momentum useful? SGD momentum helps the gradient descent algorithm gain speed in directions with persistent but small gradients even in the presence of stochasticity, while suppressing oscillations in high-curvature directions. This becomes especially important in situations where the landscape is shallow and flat in some directions and narrow and steep in others. It has been argued that first-order methods (with appropriate initial conditions) can perform comparable to more expensive second order methods, especially in the context of complex deep learning models.
These beneficial properties of momentum can sometimes become even more pronounced by using a slight modification of the classical momentum algorithm called Nesterov Accelerated Gradient (NAG).
In the NAG algorithm, rather than calculating the gradient at the current parameters, \( \nabla_\theta E(\boldsymbol{\theta}_t) \), one calculates the gradient at the expected value of the parameters given our current momentum, \( \nabla_\theta E(\boldsymbol{\theta}_t +\gamma \mathbf{v}_{t-1}) \). This yields the NAG update rule
$$ \begin{align} \mathbf{v}_{t}&=\gamma \mathbf{v}_{t-1}+\eta_{t}\nabla_\theta E(\boldsymbol{\theta}_t +\gamma \mathbf{v}_{t-1}) \nonumber \\ \boldsymbol{\theta}_{t+1}&= \boldsymbol{\theta}_t -\mathbf{v}_{t}. \label{_auto3} \end{align} $$One of the major advantages of NAG is that it allows for the use of a larger learning rate than GDM for the same choice of \( \gamma \).
Second moment of the gradient
In stochastic gradient descent, with and without momentum, we still have to specify a schedule for tuning the learning rates \( \eta_t \) as a function of time. As discussed in the context of Newton's method, this presents a number of dilemmas. The learning rate is limited by the steepest direction which can change depending on the current position in the landscape. To circumvent this problem, ideally our algorithm would keep track of curvature and take large steps in shallow, flat directions and small steps in steep, narrow directions. Second-order methods accomplish this by calculating or approximating the Hessian and normalizing the learning rate by the curvature. However, this is very computationally expensive for extremely large models. Ideally, we would like to be able to adaptively change the step size to match the landscape without paying the steep computational price of calculating or approximating Hessians.
Recently, a number of methods have been introduced that accomplish this by tracking not only the gradient, but also the second moment of the gradient. These methods include AdaGrad, AdaDelta, Root Mean Squared Propagation (RMS-Prop), and ADAM.
RMS prop
In RMS prop, in addition to keeping a running average of the first moment of the gradient, we also keep track of the second moment denoted by \( \mathbf{s}_t=\mathbb{E}[\mathbf{g}_t^2] \). The update rule for RMS prop is given by
$$ \begin{align} \mathbf{g}_t &= \nabla_\theta E(\boldsymbol{\theta}) \label{_auto4}\\ \mathbf{s}_t &=\beta \mathbf{s}_{t-1} +(1-\beta)\mathbf{g}_t^2 \nonumber \\ \boldsymbol{\theta}_{t+1}&=&\boldsymbol{\theta}_t - \eta_t { \mathbf{g}_t \over \sqrt{\mathbf{s}_t +\epsilon}}, \nonumber \end{align} $$where \( \beta \) controls the averaging time of the second moment and is typically taken to be about \( \beta=0.9 \), \( \eta_t \) is a learning rate typically chosen to be \( 10^{-3} \), and \( \epsilon\sim 10^{-8} \) is a small regularization constant to prevent divergences. Multiplication and division by vectors is understood as an element-wise operation. It is clear from this formula that the learning rate is reduced in directions where the norm of the gradient is consistently large. This greatly speeds up the convergence by allowing us to use a larger learning rate for flat directions.
ADAM optimizer
A related algorithm is the ADAM optimizer. In ADAM, we keep a running average of both the first and second moment of the gradient and use this information to adaptively change the learning rate for different parameters. The method isefficient when working with large problems involving lots data and/or parameters. It is a combination of the gradient descent with momentum algorithm and the RMSprop algorithm discussed above.
In addition to keeping a running average of the first and second moments of the gradient (i.e. \( \mathbf{m}_t=\mathbb{E}[\mathbf{g}_t] \) and \( \mathbf{s}_t=\mathbb{E}[\mathbf{g}^2_t] \), respectively), ADAM performs an additional bias correction to account for the fact that we are estimating the first two moments of the gradient using a running average (denoted by the hats in the update rule below). The update rule for ADAM is given by (where multiplication and division are once again understood to be element-wise operations below)
$$ \begin{align} \mathbf{g}_t &= \nabla_\theta E(\boldsymbol{\theta}) \label{_auto5}\\ \mathbf{m}_t &= \beta_1 \mathbf{m}_{t-1} + (1-\beta_1) \mathbf{g}_t \nonumber \\ \mathbf{s}_t &=\beta_2 \mathbf{s}_{t-1} +(1-\beta_2)\mathbf{g}_t^2 \nonumber \\ \boldsymbol{\mathbf{m}}_t&={\mathbf{m}_t \over 1-\beta_1^t} \nonumber \\ \boldsymbol{\mathbf{s}}_t &={\mathbf{s}_t \over1-\beta_2^t} \nonumber \\ \boldsymbol{\theta}_{t+1}&=\boldsymbol{\theta}_t - \eta_t { \boldsymbol{\mathbf{m}}_t \over \sqrt{\boldsymbol{\mathbf{s}}_t} +\epsilon}, \nonumber \\ \label{_auto6} \end{align} $$where \( \beta_1 \) and \( \beta_2 \) set the memory lifetime of the first and second moment and are typically taken to be \( 0.9 \) and \( 0.99 \) respectively, and \( \eta \) and \( \epsilon \) are identical to RMSprop.
Like in RMSprop, the effective step size of a parameter depends on the magnitude of its gradient squared. To understand this better, let us rewrite this expression in terms of the variance \( \boldsymbol{\sigma}_t^2 = \boldsymbol{\mathbf{s}}_t - (\boldsymbol{\mathbf{m}}_t)^2 \). Consider a single parameter \( \theta_t \). The update rule for this parameter is given by
$$ \Delta \theta_{t+1}= -\eta_t { \boldsymbol{m}_t \over \sqrt{\sigma_t^2 + m_t^2 }+\epsilon}. $$Algorithms and codes for Adagrad, RMSprop and Adam
The algorithms we have implemented are well described in the text by Goodfellow, Bengio and Courville, chapter 8.
The codes which implement these algorithms are discussed after our presentation of automatic differentiation.
Practical tips
- Randomize the data when making mini-batches. It is always important to randomly shuffle the data when forming mini-batches. Otherwise, the gradient descent method can fit spurious correlations resulting from the order in which data is presented.
- Transform your inputs. Learning becomes difficult when our landscape has a mixture of steep and flat directions. One simple trick for minimizing these situations is to standardize the data by subtracting the mean and normalizing the variance of input variables. Whenever possible, also decorrelate the inputs. To understand why this is helpful, consider the case of linear regression. It is easy to show that for the squared error cost function, the Hessian of the cost function is just the correlation matrix between the inputs. Thus, by standardizing the inputs, we are ensuring that the landscape looks homogeneous in all directions in parameter space. Since most deep networks can be viewed as linear transformations followed by a non-linearity at each layer, we expect this intuition to hold beyond the linear case.
- Monitor the out-of-sample performance. Always monitor the performance of your model on a validation set (a small portion of the training data that is held out of the training process to serve as a proxy for the test set. If the validation error starts increasing, then the model is beginning to overfit. Terminate the learning process. This early stopping significantly improves performance in many settings.
- Adaptive optimization methods don't always have good generalization. Recent studies have shown that adaptive methods such as ADAM, RMSPorp, and AdaGrad tend to have poor generalization compared to SGD or SGD with momentum, particularly in the high-dimensional limit (i.e. the number of parameters exceeds the number of data points). Although it is not clear at this stage why these methods perform so well in training deep neural networks, simpler procedures like properly-tuned SGD may work as well or better in these applications.
Geron's text, see chapter 11, has several interesting discussions.
Automatic differentiation
Automatic differentiation (AD), also called algorithmic differentiation or computational differentiation,is a set of techniques to numerically evaluate the derivative of a function specified by a computer program. AD exploits the fact that every computer program, no matter how complicated, executes a sequence of elementary arithmetic operations (addition, subtraction, multiplication, division, etc.) and elementary functions (exp, log, sin, cos, etc.). By applying the chain rule repeatedly to these operations, derivatives of arbitrary order can be computed automatically, accurately to working precision, and using at most a small constant factor more arithmetic operations than the original program.
Automatic differentiation is neither:
- Symbolic differentiation, nor
- Numerical differentiation (the method of finite differences).
Symbolic differentiation can lead to inefficient code and faces the difficulty of converting a computer program into a single expression, while numerical differentiation can introduce round-off errors in the discretization process and cancellation
Python has tools for so-called automatic differentiation. Consider the following example
$$ f(x) = \sin\left(2\pi x + x^2\right) $$which has the following derivative
$$ f'(x) = \cos\left(2\pi x + x^2\right)\left(2\pi + 2x\right) $$Using autograd we have
import autograd.numpy as np
# To do elementwise differentiation:
from autograd import elementwise_grad as egrad
# To plot:
import matplotlib.pyplot as plt
def f(x):
return np.sin(2*np.pi*x + x**2)
def f_grad_analytic(x):
return np.cos(2*np.pi*x + x**2)*(2*np.pi + 2*x)
# Do the comparison:
x = np.linspace(0,1,1000)
f_grad = egrad(f)
computed = f_grad(x)
analytic = f_grad_analytic(x)
plt.title('Derivative computed from Autograd compared with the analytical derivative')
plt.plot(x,computed,label='autograd')
plt.plot(x,analytic,label='analytic')
plt.xlabel('x')
plt.ylabel('y')
plt.legend()
plt.show()
print("The max absolute difference is: %g"%(np.max(np.abs(computed - analytic))))
Using autograd
Here we experiment with what kind of functions Autograd is capable of finding the gradient of. The following Python functions are just meant to illustrate what Autograd can do, but please feel free to experiment with other, possibly more complicated, functions as well.
import autograd.numpy as np
from autograd import grad
def f1(x):
return x**3 + 1
f1_grad = grad(f1)
# Remember to send in float as argument to the computed gradient from Autograd!
a = 1.0
# See the evaluated gradient at a using autograd:
print("The gradient of f1 evaluated at a = %g using autograd is: %g"%(a,f1_grad(a)))
# Compare with the analytical derivative, that is f1'(x) = 3*x**2
grad_analytical = 3*a**2
print("The gradient of f1 evaluated at a = %g by finding the analytic expression is: %g"%(a,grad_analytical))
Autograd with more complicated functions
To differentiate with respect to two (or more) arguments of a Python function, Autograd need to know at which variable the function if being differentiated with respect to.
import autograd.numpy as np
from autograd import grad
def f2(x1,x2):
return 3*x1**3 + x2*(x1 - 5) + 1
# By sending the argument 0, Autograd will compute the derivative w.r.t the first variable, in this case x1
f2_grad_x1 = grad(f2,0)
# ... and differentiate w.r.t x2 by sending 1 as an additional arugment to grad
f2_grad_x2 = grad(f2,1)
x1 = 1.0
x2 = 3.0
print("Evaluating at x1 = %g, x2 = %g"%(x1,x2))
print("-"*30)
# Compare with the analytical derivatives:
# Derivative of f2 w.r.t x1 is: 9*x1**2 + x2:
f2_grad_x1_analytical = 9*x1**2 + x2
# Derivative of f2 w.r.t x2 is: x1 - 5:
f2_grad_x2_analytical = x1 - 5
# See the evaluated derivations:
print("The derivative of f2 w.r.t x1: %g"%( f2_grad_x1(x1,x2) ))
print("The analytical derivative of f2 w.r.t x1: %g"%( f2_grad_x1(x1,x2) ))
print()
print("The derivative of f2 w.r.t x2: %g"%( f2_grad_x2(x1,x2) ))
print("The analytical derivative of f2 w.r.t x2: %g"%( f2_grad_x2(x1,x2) ))
Note that the grad function will not produce the true gradient of the function. The true gradient of a function with two or more variables will produce a vector, where each element is the function differentiated w.r.t a variable.
More complicated functions using the elements of their arguments directly
import autograd.numpy as np
from autograd import grad
def f3(x): # Assumes x is an array of length 5 or higher
return 2*x[0] + 3*x[1] + 5*x[2] + 7*x[3] + 11*x[4]**2
f3_grad = grad(f3)
x = np.linspace(0,4,5)
# Print the computed gradient:
print("The computed gradient of f3 is: ", f3_grad(x))
# The analytical gradient is: (2, 3, 5, 7, 22*x[4])
f3_grad_analytical = np.array([2, 3, 5, 7, 22*x[4]])
# Print the analytical gradient:
print("The analytical gradient of f3 is: ", f3_grad_analytical)
Note that in this case, when sending an array as input argument, the output from Autograd is another array. This is the true gradient of the function, as opposed to the function in the previous example. By using arrays to represent the variables, the output from Autograd might be easier to work with, as the output is closer to what one could expect form a gradient-evaluting function.
Functions using mathematical functions from Numpy
import autograd.numpy as np
from autograd import grad
def f4(x):
return np.sqrt(1+x**2) + np.exp(x) + np.sin(2*np.pi*x)
f4_grad = grad(f4)
x = 2.7
# Print the computed derivative:
print("The computed derivative of f4 at x = %g is: %g"%(x,f4_grad(x)))
# The analytical derivative is: x/sqrt(1 + x**2) + exp(x) + cos(2*pi*x)*2*pi
f4_grad_analytical = x/np.sqrt(1 + x**2) + np.exp(x) + np.cos(2*np.pi*x)*2*np.pi
# Print the analytical gradient:
print("The analytical gradient of f4 at x = %g is: %g"%(x,f4_grad_analytical))
More autograd
import autograd.numpy as np
from autograd import grad
def f5(x):
if x >= 0:
return x**2
else:
return -3*x + 1
f5_grad = grad(f5)
x = 2.7
# Print the computed derivative:
print("The computed derivative of f5 at x = %g is: %g"%(x,f5_grad(x)))
And with loops
import autograd.numpy as np
from autograd import grad
def f6_for(x):
val = 0
for i in range(10):
val = val + x**i
return val
def f6_while(x):
val = 0
i = 0
while i < 10:
val = val + x**i
i = i + 1
return val
f6_for_grad = grad(f6_for)
f6_while_grad = grad(f6_while)
x = 0.5
# Print the computed derivaties of f6_for and f6_while
print("The computed derivative of f6_for at x = %g is: %g"%(x,f6_for_grad(x)))
print("The computed derivative of f6_while at x = %g is: %g"%(x,f6_while_grad(x)))
import autograd.numpy as np
from autograd import grad
# Both of the functions are implementation of the sum: sum(x**i) for i = 0, ..., 9
# The analytical derivative is: sum(i*x**(i-1))
f6_grad_analytical = 0
for i in range(10):
f6_grad_analytical += i*x**(i-1)
print("The analytical derivative of f6 at x = %g is: %g"%(x,f6_grad_analytical))
Using recursion
import autograd.numpy as np
from autograd import grad
def f7(n): # Assume that n is an integer
if n == 1 or n == 0:
return 1
else:
return n*f7(n-1)
f7_grad = grad(f7)
n = 2.0
print("The computed derivative of f7 at n = %d is: %g"%(n,f7_grad(n)))
# The function f7 is an implementation of the factorial of n.
# By using the product rule, one can find that the derivative is:
f7_grad_analytical = 0
for i in range(int(n)-1):
tmp = 1
for k in range(int(n)-1):
if k != i:
tmp *= (n - k)
f7_grad_analytical += tmp
print("The analytical derivative of f7 at n = %d is: %g"%(n,f7_grad_analytical))
Note that if n is equal to zero or one, Autograd will give an error message. This message appears when the output is independent on input.
Unsupported functions
Autograd supports many features. However, there are some functions that is not supported (yet) by Autograd.
Assigning a value to the variable being differentiated with respect to
import autograd.numpy as np
from autograd import grad
def f8(x): # Assume x is an array
x[2] = 3
return x*2
f8_grad = grad(f8)
x = 8.4
print("The derivative of f8 is:",f8_grad(x))
Here, Autograd tells us that an 'ArrayBox' does not support item assignment. The item assignment is done when the program tries to assign x[2] to the value 3. However, Autograd has implemented the computation of the derivative such that this assignment is not possible.
The syntax a.dot(b) when finding the dot product
import autograd.numpy as np
from autograd import grad
def f9(a): # Assume a is an array with 2 elements
b = np.array([1.0,2.0])
return a.dot(b)
f9_grad = grad(f9)
x = np.array([1.0,0.0])
print("The derivative of f9 is:",f9_grad(x))
Here we are told that the 'dot' function does not belong to Autograd's version of a Numpy array. To overcome this, an alternative syntax which also computed the dot product can be used:
import autograd.numpy as np
from autograd import grad
def f9_alternative(x): # Assume a is an array with 2 elements
b = np.array([1.0,2.0])
return np.dot(x,b) # The same as x_1*b_1 + x_2*b_2
f9_alternative_grad = grad(f9_alternative)
x = np.array([3.0,0.0])
print("The gradient of f9 is:",f9_alternative_grad(x))
# The analytical gradient of the dot product of vectors x and b with two elements (x_1,x_2) and (b_1, b_2) respectively
# w.r.t x is (b_1, b_2).
Recommended to avoid
The documentation recommends to avoid inplace operations such as
a += b
a -= b
a*= b
a /=b
Using Autograd with OLS
We conclude the part on optmization by showing how we can make codes for linear regression and logistic regression using autograd. The first example shows results with ordinary leats squares.
# Using Autograd to calculate gradients for OLS
from random import random, seed
import numpy as np
import autograd.numpy as np
import matplotlib.pyplot as plt
from autograd import grad
def CostOLS(beta):
return (1.0/n)*np.sum((y-X @ beta)**2)
n = 100
x = 2*np.random.rand(n,1)
y = 4+3*x+np.random.randn(n,1)
X = np.c_[np.ones((n,1)), x]
XT_X = X.T @ X
theta_linreg = np.linalg.pinv(XT_X) @ (X.T @ y)
print("Own inversion")
print(theta_linreg)
# Hessian matrix
H = (2.0/n)* XT_X
EigValues, EigVectors = np.linalg.eig(H)
print(f"Eigenvalues of Hessian Matrix:{EigValues}")
theta = np.random.randn(2,1)
eta = 1.0/np.max(EigValues)
Niterations = 1000
# define the gradient
training_gradient = grad(CostOLS)
for iter in range(Niterations):
gradients = training_gradient(theta)
theta -= eta*gradients
print("theta from own gd")
print(theta)
xnew = np.array([[0],[2]])
Xnew = np.c_[np.ones((2,1)), xnew]
ypredict = Xnew.dot(theta)
ypredict2 = Xnew.dot(theta_linreg)
plt.plot(xnew, ypredict, "r-")
plt.plot(xnew, ypredict2, "b-")
plt.plot(x, y ,'ro')
plt.axis([0,2.0,0, 15.0])
plt.xlabel(r'$x$')
plt.ylabel(r'$y$')
plt.title(r'Random numbers ')
plt.show()
Same code but now with momentum gradient descent
# Using Autograd to calculate gradients for OLS
from random import random, seed
import numpy as np
import autograd.numpy as np
import matplotlib.pyplot as plt
from autograd import grad
def CostOLS(beta):
return (1.0/n)*np.sum((y-X @ beta)**2)
n = 100
x = 2*np.random.rand(n,1)
y = 4+3*x#+np.random.randn(n,1)
X = np.c_[np.ones((n,1)), x]
XT_X = X.T @ X
theta_linreg = np.linalg.pinv(XT_X) @ (X.T @ y)
print("Own inversion")
print(theta_linreg)
# Hessian matrix
H = (2.0/n)* XT_X
EigValues, EigVectors = np.linalg.eig(H)
print(f"Eigenvalues of Hessian Matrix:{EigValues}")
theta = np.random.randn(2,1)
eta = 1.0/np.max(EigValues)
Niterations = 30
# define the gradient
training_gradient = grad(CostOLS)
for iter in range(Niterations):
gradients = training_gradient(theta)
theta -= eta*gradients
print(iter,gradients[0],gradients[1])
print("theta from own gd")
print(theta)
# Now improve with momentum gradient descent
change = 0.0
delta_momentum = 0.3
for iter in range(Niterations):
# calculate gradient
gradients = training_gradient(theta)
# calculate update
new_change = eta*gradients+delta_momentum*change
# take a step
theta -= new_change
# save the change
change = new_change
print(iter,gradients[0],gradients[1])
print("theta from own gd wth momentum")
print(theta)
But none of these can compete with Newton's method
# Using Newton's method
from random import random, seed
import numpy as np
import autograd.numpy as np
import matplotlib.pyplot as plt
from autograd import grad
def CostOLS(beta):
return (1.0/n)*np.sum((y-X @ beta)**2)
n = 100
x = 2*np.random.rand(n,1)
y = 4+3*x+np.random.randn(n,1)
X = np.c_[np.ones((n,1)), x]
XT_X = X.T @ X
beta_linreg = np.linalg.pinv(XT_X) @ (X.T @ y)
print("Own inversion")
print(beta_linreg)
# Hessian matrix
H = (2.0/n)* XT_X
# Note that here the Hessian does not depend on the parameters beta
invH = np.linalg.pinv(H)
EigValues, EigVectors = np.linalg.eig(H)
print(f"Eigenvalues of Hessian Matrix:{EigValues}")
beta = np.random.randn(2,1)
Niterations = 5
# define the gradient
training_gradient = grad(CostOLS)
for iter in range(Niterations):
gradients = training_gradient(beta)
beta -= invH @ gradients
print(iter,gradients[0],gradients[1])
print("beta from own Newton code")
print(beta)
Including Stochastic Gradient Descent with Autograd
In this code we include the stochastic gradient descent approach discussed above. Note here that we specify which argument we are taking the derivative with respect to when using autograd.
# Using Autograd to calculate gradients using SGD
# OLS example
from random import random, seed
import numpy as np
import autograd.numpy as np
import matplotlib.pyplot as plt
from autograd import grad
# Note change from previous example
def CostOLS(y,X,theta):
return np.sum((y-X @ theta)**2)
n = 100
x = 2*np.random.rand(n,1)
y = 4+3*x+np.random.randn(n,1)
X = np.c_[np.ones((n,1)), x]
XT_X = X.T @ X
theta_linreg = np.linalg.pinv(XT_X) @ (X.T @ y)
print("Own inversion")
print(theta_linreg)
# Hessian matrix
H = (2.0/n)* XT_X
EigValues, EigVectors = np.linalg.eig(H)
print(f"Eigenvalues of Hessian Matrix:{EigValues}")
theta = np.random.randn(2,1)
eta = 1.0/np.max(EigValues)
Niterations = 1000
# Note that we request the derivative wrt third argument (theta, 2 here)
training_gradient = grad(CostOLS,2)
for iter in range(Niterations):
gradients = (1.0/n)*training_gradient(y, X, theta)
theta -= eta*gradients
print("theta from own gd")
print(theta)
xnew = np.array([[0],[2]])
Xnew = np.c_[np.ones((2,1)), xnew]
ypredict = Xnew.dot(theta)
ypredict2 = Xnew.dot(theta_linreg)
plt.plot(xnew, ypredict, "r-")
plt.plot(xnew, ypredict2, "b-")
plt.plot(x, y ,'ro')
plt.axis([0,2.0,0, 15.0])
plt.xlabel(r'$x$')
plt.ylabel(r'$y$')
plt.title(r'Random numbers ')
plt.show()
n_epochs = 50
M = 5 #size of each minibatch
m = int(n/M) #number of minibatches
t0, t1 = 5, 50
def learning_schedule(t):
return t0/(t+t1)
theta = np.random.randn(2,1)
for epoch in range(n_epochs):
# Can you figure out a better way of setting up the contributions to each batch?
for i in range(m):
random_index = M*np.random.randint(m)
xi = X[random_index:random_index+M]
yi = y[random_index:random_index+M]
gradients = (1.0/M)*training_gradient(yi, xi, theta)
eta = learning_schedule(epoch*m+i)
theta = theta - eta*gradients
print("theta from own sdg")
print(theta)
Same code but now with momentum gradient descent
# Using Autograd to calculate gradients using SGD
# OLS example
from random import random, seed
import numpy as np
import autograd.numpy as np
import matplotlib.pyplot as plt
from autograd import grad
# Note change from previous example
def CostOLS(y,X,theta):
return np.sum((y-X @ theta)**2)
n = 100
x = 2*np.random.rand(n,1)
y = 4+3*x+np.random.randn(n,1)
X = np.c_[np.ones((n,1)), x]
XT_X = X.T @ X
theta_linreg = np.linalg.pinv(XT_X) @ (X.T @ y)
print("Own inversion")
print(theta_linreg)
# Hessian matrix
H = (2.0/n)* XT_X
EigValues, EigVectors = np.linalg.eig(H)
print(f"Eigenvalues of Hessian Matrix:{EigValues}")
theta = np.random.randn(2,1)
eta = 1.0/np.max(EigValues)
Niterations = 100
# Note that we request the derivative wrt third argument (theta, 2 here)
training_gradient = grad(CostOLS,2)
for iter in range(Niterations):
gradients = (1.0/n)*training_gradient(y, X, theta)
theta -= eta*gradients
print("theta from own gd")
print(theta)
n_epochs = 50
M = 5 #size of each minibatch
m = int(n/M) #number of minibatches
t0, t1 = 5, 50
def learning_schedule(t):
return t0/(t+t1)
theta = np.random.randn(2,1)
change = 0.0
delta_momentum = 0.3
for epoch in range(n_epochs):
for i in range(m):
random_index = M*np.random.randint(m)
xi = X[random_index:random_index+M]
yi = y[random_index:random_index+M]
gradients = (1.0/M)*training_gradient(yi, xi, theta)
eta = learning_schedule(epoch*m+i)
# calculate update
new_change = eta*gradients+delta_momentum*change
# take a step
theta -= new_change
# save the change
change = new_change
print("theta from own sdg with momentum")
print(theta)
AdaGrad algorithm, taken from Goodfellow et al
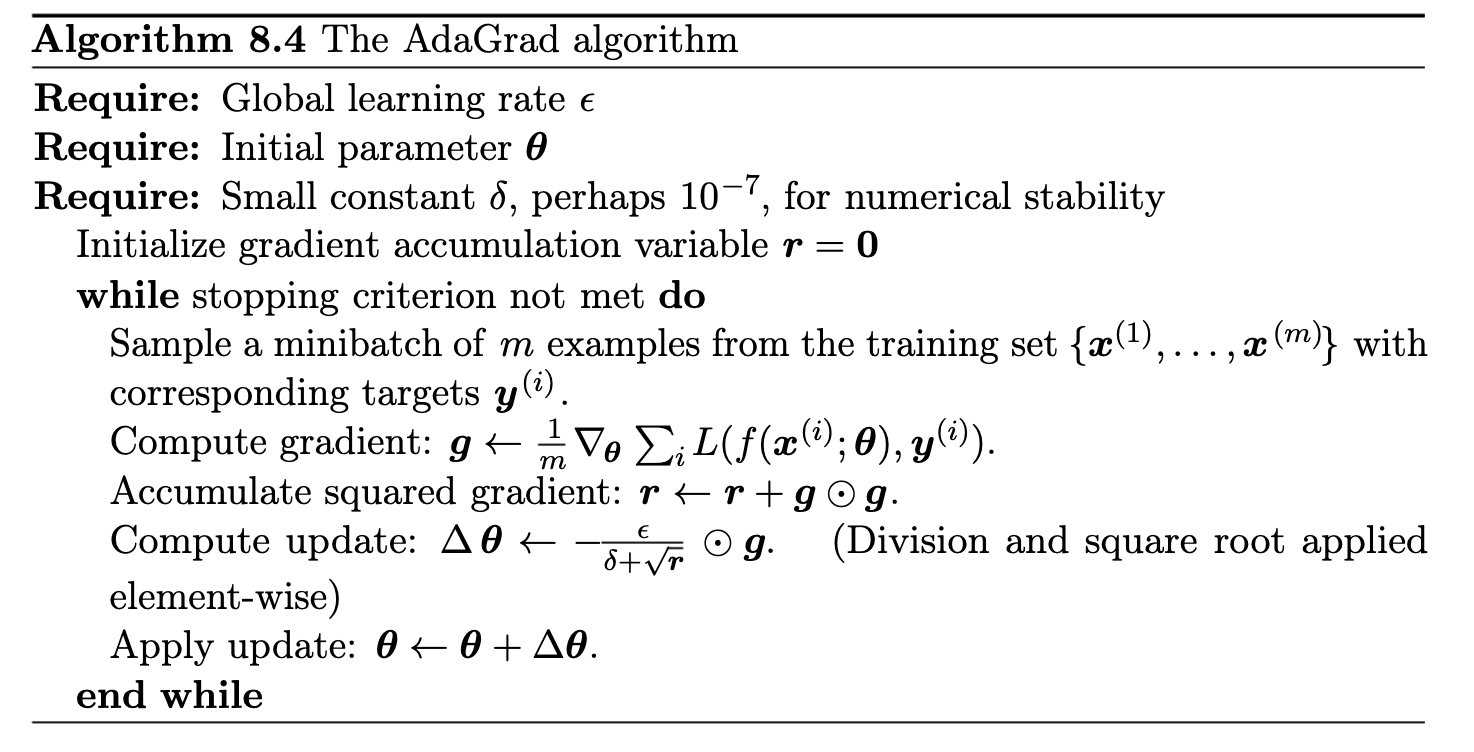
Similar (second order function now) problem but now with AdaGrad
# Using Autograd to calculate gradients using AdaGrad and Stochastic Gradient descent
# OLS example
from random import random, seed
import numpy as np
import autograd.numpy as np
import matplotlib.pyplot as plt
from autograd import grad
# Note change from previous example
def CostOLS(y,X,theta):
return np.sum((y-X @ theta)**2)
n = 1000
x = np.random.rand(n,1)
y = 2.0+3*x +4*x*x
X = np.c_[np.ones((n,1)), x, x*x]
XT_X = X.T @ X
theta_linreg = np.linalg.pinv(XT_X) @ (X.T @ y)
print("Own inversion")
print(theta_linreg)
# Note that we request the derivative wrt third argument (theta, 2 here)
training_gradient = grad(CostOLS,2)
# Define parameters for Stochastic Gradient Descent
n_epochs = 50
M = 5 #size of each minibatch
m = int(n/M) #number of minibatches
# Guess for unknown parameters theta
theta = np.random.randn(3,1)
# Value for learning rate
eta = 0.01
# Including AdaGrad parameter to avoid possible division by zero
delta = 1e-8
for epoch in range(n_epochs):
Giter = 0.0
for i in range(m):
random_index = M*np.random.randint(m)
xi = X[random_index:random_index+M]
yi = y[random_index:random_index+M]
gradients = (1.0/M)*training_gradient(yi, xi, theta)
Giter += gradients*gradients
update = gradients*eta/(delta+np.sqrt(Giter))
theta -= update
print("theta from own AdaGrad")
print(theta)
Running this code we note an almost perfect agreement with the results from matrix inversion.
RMSProp algorithm, taken from Goodfellow et al
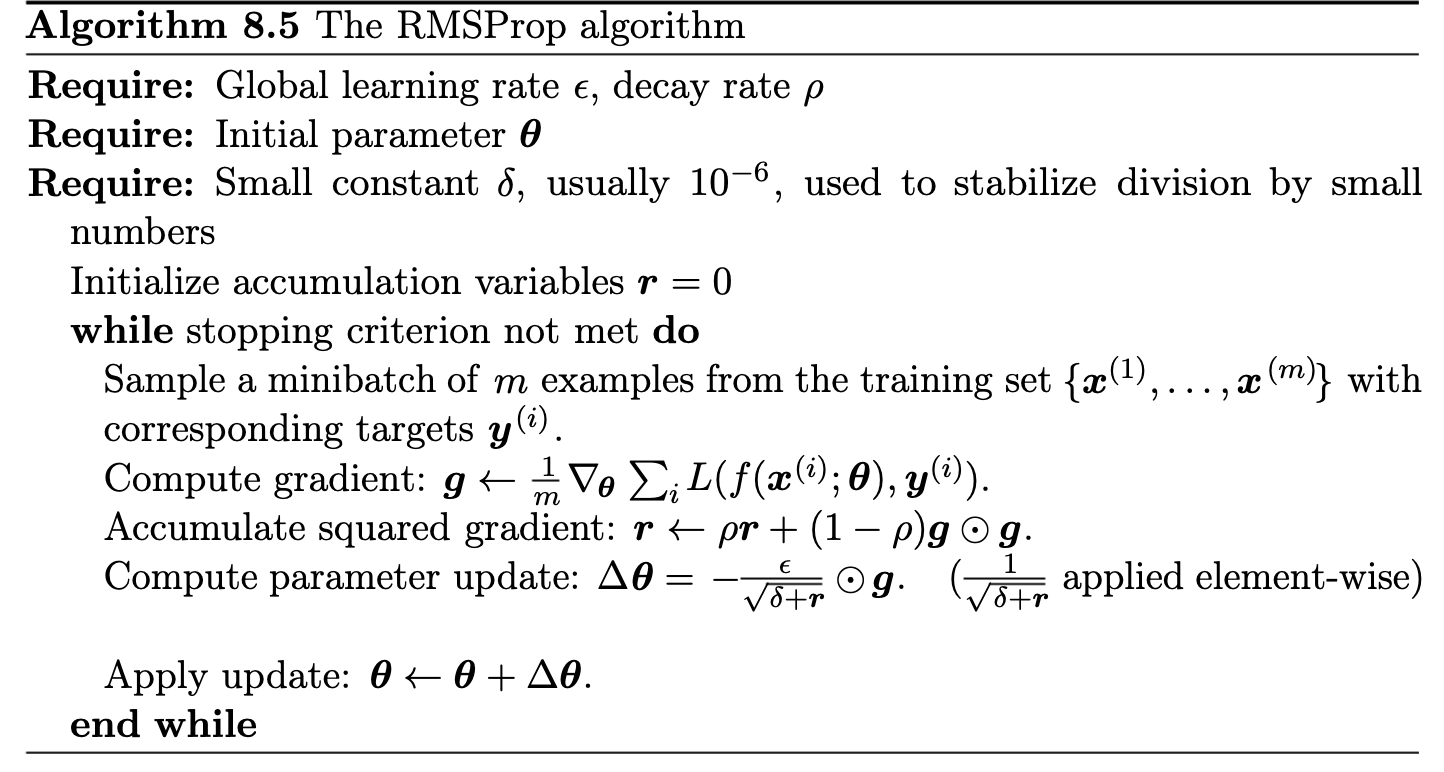
RMSprop for adaptive learning rate with Stochastic Gradient Descent
# Using Autograd to calculate gradients using RMSprop and Stochastic Gradient descent
# OLS example
from random import random, seed
import numpy as np
import autograd.numpy as np
import matplotlib.pyplot as plt
from autograd import grad
# Note change from previous example
def CostOLS(y,X,theta):
return np.sum((y-X @ theta)**2)
n = 1000
x = np.random.rand(n,1)
y = 2.0+3*x +4*x*x# +np.random.randn(n,1)
X = np.c_[np.ones((n,1)), x, x*x]
XT_X = X.T @ X
theta_linreg = np.linalg.pinv(XT_X) @ (X.T @ y)
print("Own inversion")
print(theta_linreg)
# Note that we request the derivative wrt third argument (theta, 2 here)
training_gradient = grad(CostOLS,2)
# Define parameters for Stochastic Gradient Descent
n_epochs = 50
M = 5 #size of each minibatch
m = int(n/M) #number of minibatches
# Guess for unknown parameters theta
theta = np.random.randn(3,1)
# Value for learning rate
eta = 0.01
# Value for parameter rho
rho = 0.99
# Including AdaGrad parameter to avoid possible division by zero
delta = 1e-8
for epoch in range(n_epochs):
Giter = 0.0
for i in range(m):
random_index = M*np.random.randint(m)
xi = X[random_index:random_index+M]
yi = y[random_index:random_index+M]
gradients = (1.0/M)*training_gradient(yi, xi, theta)
# Accumulated gradient
# Scaling with rho the new and the previous results
Giter = (rho*Giter+(1-rho)*gradients*gradients)
# Taking the diagonal only and inverting
update = gradients*eta/(delta+np.sqrt(Giter))
# Hadamard product
theta -= update
print("theta from own RMSprop")
print(theta)
ADAM algorithm, taken from Goodfellow et al
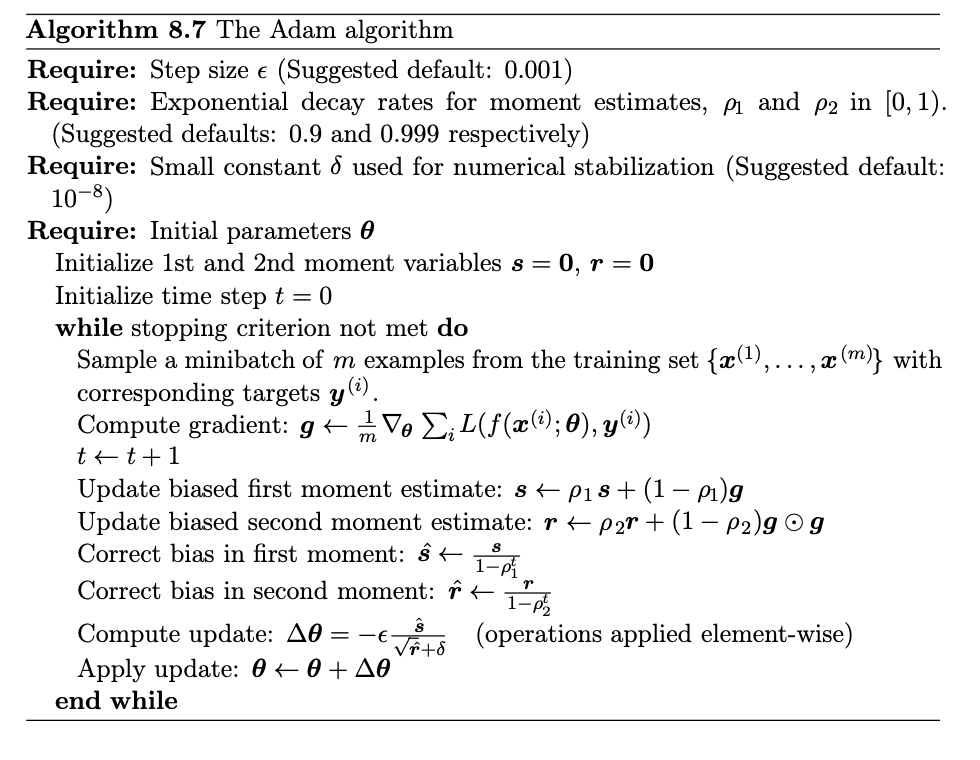
And finally ADAM
# Using Autograd to calculate gradients using RMSprop and Stochastic Gradient descent
# OLS example
from random import random, seed
import numpy as np
import autograd.numpy as np
import matplotlib.pyplot as plt
from autograd import grad
# Note change from previous example
def CostOLS(y,X,theta):
return np.sum((y-X @ theta)**2)
n = 1000
x = np.random.rand(n,1)
y = 2.0+3*x +4*x*x# +np.random.randn(n,1)
X = np.c_[np.ones((n,1)), x, x*x]
XT_X = X.T @ X
theta_linreg = np.linalg.pinv(XT_X) @ (X.T @ y)
print("Own inversion")
print(theta_linreg)
# Note that we request the derivative wrt third argument (theta, 2 here)
training_gradient = grad(CostOLS,2)
# Define parameters for Stochastic Gradient Descent
n_epochs = 50
M = 5 #size of each minibatch
m = int(n/M) #number of minibatches
# Guess for unknown parameters theta
theta = np.random.randn(3,1)
# Value for learning rate
eta = 0.01
# Value for parameters beta1 and beta2, see https://arxiv.org/abs/1412.6980
beta1 = 0.9
beta2 = 0.999
# Including AdaGrad parameter to avoid possible division by zero
delta = 1e-7
iter = 0
for epoch in range(n_epochs):
first_moment = 0.0
second_moment = 0.0
iter += 1
for i in range(m):
random_index = M*np.random.randint(m)
xi = X[random_index:random_index+M]
yi = y[random_index:random_index+M]
gradients = (1.0/M)*training_gradient(yi, xi, theta)
# Computing moments first
first_moment = beta1*first_moment + (1-beta1)*gradients
second_moment = beta2*second_moment+(1-beta2)*gradients*gradients
first_term = first_moment/(1.0-beta1**iter)
second_term = second_moment/(1.0-beta2**iter)
# Scaling with rho the new and the previous results
update = eta*first_term/(np.sqrt(second_term)+delta)
theta -= update
print("theta from own ADAM")
print(theta)
Introducing JAX
Presently, instead of using autograd, we recommend using JAX
JAX is Autograd and XLA (Accelerated Linear Algebra)), brought together for high-performance numerical computing and machine learning research. It provides composable transformations of Python+NumPy programs: differentiate, vectorize, parallelize, Just-In-Time compile to GPU/TPU, and more.
Getting started with Jax, note the way we import numpy
import jax
import jax.numpy as jnp
import numpy as np
import matplotlib.pyplot as plt
from jax import grad as jax_grad
A warm-up example
def function(x):
return x**2
def analytical_gradient(x):
return 2*x
def gradient_descent(starting_point, learning_rate, num_iterations, solver="analytical"):
x = starting_point
trajectory_x = [x]
trajectory_y = [function(x)]
if solver == "analytical":
grad = analytical_gradient
elif solver == "jax":
grad = jax_grad(function)
x = jnp.float64(x)
learning_rate = jnp.float64(learning_rate)
for _ in range(num_iterations):
x = x - learning_rate * grad(x)
trajectory_x.append(x)
trajectory_y.append(function(x))
return trajectory_x, trajectory_y
x = np.linspace(-5, 5, 100)
plt.plot(x, function(x), label="f(x)")
descent_x, descent_y = gradient_descent(5, 0.1, 10, solver="analytical")
jax_descend_x, jax_descend_y = gradient_descent(5, 0.1, 10, solver="jax")
plt.plot(descent_x, descent_y, label="Gradient descent", marker="o")
plt.plot(jax_descend_x, jax_descend_y, label="JAX", marker="x")
A more advanced example
backend = np
def function(x):
return x*backend.sin(x**2 + 1)
def analytical_gradient(x):
return backend.sin(x**2 + 1) + 2*x**2*backend.cos(x**2 + 1)
x = np.linspace(-5, 5, 100)
plt.plot(x, function(x), label="f(x)")
descent_x, descent_y = gradient_descent(1, 0.01, 300, solver="analytical")
# Change the backend to JAX
backend = jnp
jax_descend_x, jax_descend_y = gradient_descent(1, 0.01, 300, solver="jax")
plt.scatter(descent_x, descent_y, label="Gradient descent", marker="v", s=10, color="red")
plt.scatter(jax_descend_x, jax_descend_y, label="JAX", marker="x", s=5, color="black")
And Logistic Regression
import autograd.numpy as np
from autograd import grad
def sigmoid(x):
return 0.5 * (np.tanh(x / 2.) + 1)
def logistic_predictions(weights, inputs):
# Outputs probability of a label being true according to logistic model.
return sigmoid(np.dot(inputs, weights))
def training_loss(weights):
# Training loss is the negative log-likelihood of the training labels.
preds = logistic_predictions(weights, inputs)
label_probabilities = preds * targets + (1 - preds) * (1 - targets)
return -np.sum(np.log(label_probabilities))
# Build a toy dataset.
inputs = np.array([[0.52, 1.12, 0.77],
[0.88, -1.08, 0.15],
[0.52, 0.06, -1.30],
[0.74, -2.49, 1.39]])
targets = np.array([True, True, False, True])
# Define a function that returns gradients of training loss using Autograd.
training_gradient_fun = grad(training_loss)
# Optimize weights using gradient descent.
weights = np.array([0.0, 0.0, 0.0])
print("Initial loss:", training_loss(weights))
for i in range(100):
weights -= training_gradient_fun(weights) * 0.01
print("Trained loss:", training_loss(weights))
Overarching aims of the exercises
The aim of the exercises this week is to get started with implementing gradient methods.
In order to get started, we will now replace in our standard ordinary least squares (OLS) and Ridge regression codes the matrix inversion algorithm with our own gradient descent (GD) and SGD codes. In developing the codes we recommend using a simple function like \( f(x)=a_0+a_1x+a_2x^2 \) or higher-order one-dimensional polynomials.
You should include in your analysis of the GD and SGD codes the following elements
- A plain gradient descent with a fixed learning rate (you will need to tune it) using the analytical expression of the gradients
- Add momentum to the plain GD code and compare convergence with a fixed learning rate (you may need to tune the learning rate), again using the analytical expression of the gradients.
- Repeat these steps for stochastic gradient descent with mini batches and a given number of epochs. Use a tunable learning rate. Discuss the results as functions of the various parameters (size of batches, number of epochs etc)
- Implement the Adagrad method in order to tune the learning rate. Do this with and without momentum for plain gradient descent and SGD.
- Add RMSprop and Adam to your library of methods for tuning the learning rate.
In summary, you should perform an analysis of the results for OLS and Ridge regression as function of the chosen learning rates, the number of mini-batches and epochs as well as algorithm for scaling the learning rate. You can also compare your own results with those that can be obtained using for example Scikit-Learn's various SGD options. Discuss your results. For Ridge regression you need now to study the results as functions of the hyper-parameter \( \lambda \) and the learning rate \( \eta \). Discuss your results.
We recommend reading chapter 8 on optimization from the textbook of Goodfellow, Bengio and Courville. This chapter contains many useful insights and discussions on the optimization part of machine learning.